
Beschreibung
Die Funktion "BM_FindNotchPosRAFS" führt eine Rastlagensuche (Parameter 127.008.0.0) mit dem Modus von "Stehende Welle und variabler Bestromungswinkel", die Achse muss nicht für diese Messung frei beweglich sein, nach erfolgreicher Messung wird der neu ermittelte Rastwinkel ausgegeben.
Der neu ermittelte Wert ist bereits im RAM des Reglers gültig, eine Übernahme ins FLASH des Reglers ist mit der Klasse BM_DataSetHandling möglich.
Weiterführende Informationen zur
Rastlagensuche finden sich im Baumüller "Parameterhandbuch Grundgerät bmaXX
5000" Kapitel 3.9.8.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Flankensensitive Ausführung |
|
CurrentRise |
REAL |
Stromanstieg [A/s] |
|
CurrentDrop |
REAL |
Stromabfall [A/s] |
|
TimeConstCurrent |
REAL |
Dauer Konstantstrom [s] |
|
CurrentRef |
REAL |
Stromsollwert Rastwinkelsuche[%] |
|
AngleRising |
REAL |
Winkelanstieg[U/min] |
|
MaxAngle |
REAL |
Maximaler Verfahrwinkel [Grad] |
|
ErrLimitMechDeltaAnlge |
REAL |
Fehlergrenze mechanische Winkeländerung[Grad] |
|
Averaging0SpeedDetect |
REAL |
Mittelung Stillstandserkennung |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Rastwinkel Sucher Erfolgreich. |
|
Moving |
BOOL |
Rastwinkel Suche läuft. |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv. |
|
CommandAborted |
BOOL |
Abbruch durch ein anderes Motion Control Kommando, BM_Stop oder Errorstop… |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Bevor das Kommando von "BM_FindNotchPosRAFS" gestartet werde, muss "BM_Power" ausgeschaltet sein und die Achse muss frei beweglich sein.
Das Kommando "Execute = 1" schaltet die Achse Rastwinkel Suche ein, mit einer flankensensitive Ausführung werde alle Eingangswerte übernommen und das Kommando an dem Axis gestartet. Ein erneutes Aufschalten des Kommandos erfordert ein FALSE nach TRUE Wechsel am Eingang Execute, wobei dieser Wechsel zur Ausführungszeit des Kommandos durchgeführt werden kann.
Bewegungskommando:
Die flankensensitive Ausführung in abgeschalteten BM_Power Zustand. Die Ausführung von Abbruch wird mit BM_Stop, fehlender Betriebsbereitschaft oder Errorstop abgebrochen. Bei der Ergebnismeldung ist immer nur eines der Ausgangsbits Done, Busy, CommandAborted aktiv.
Flankensensitive Ausführung:
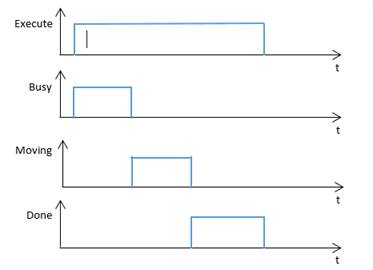
Zur Ausführung des Kommandos kann der Eingang Execute ein Zyklus TRUE sein, Anschließend wird das Kommando ausgeführt, das Ergebnis Done = 1 nach Erfolg des Rastwinkel Suchers, Output Parameter Busy, CommandAborted Error und ErrorID werden zurückgesetzt, wenn Eingang Execute =0.
Diagramm für Flankensensitive Ausführung:
Diagramm 1:
Zustandskontrolle
über BM_ReadStatus:
Aus Zustand: Standstill.
Nach Zustand: -
Empfohlene Task: OB1.
Hinweis:
"BM_Power" und andere Funktion Baustein müssen ausgeschaltet sein, die Achse muss frei beweglich sein.
Ein Befehl von "BM_FindNotchPosRAFS " darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde. Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
Eingang Execute:
TRUE: Flankensensitive Ausführung, die Eingangsparameter werden übernommen und
Start
Rastwinkelsuche.
FALSE: Keine Ausführung, oder Reset der FC-Ausgänge von Error & ErrorID.
Eingang CurrentRise:
Stromanstieg in der Einheit A/s.
Minimal: 0.001 [A/s], maximal: 100.0 [A/s]
Default: 1.0 [A/s], wenn CurrentRise =0.0
Eingang CurrentDrop:
Stromabfall in der Einheit A/s.
Minimal: 0.001 [A/s], maximal: 100.0 [A/s]
Default: 5.0 [A/s], wenn CurrentDrop =0.0
Eingang TimeConstCurrent:
Der Parameter stellt die Mindestdauer für die Konstantstromphase bei Rastwinkelsuche ein.
Minimal: 0.01 [s] = 0.0[s], maximal: 10.0 [s]
Default: 1.0 [s], wenn TimeConstCurrent =0.0
Eingang CurrentRef:
Strom für die Rastwinkelsuche. Normung:100% entsprechen Motor Nennstrom.
Minimal: 0.01 [%]=0.0[%], maximal: 100.0 [%]
Default: 50.0 [%], wenn Parameter CurrentRef=0.0
Eingang AngleRising:
Der Parameter gibt die Änderung des Winkels vor, um die der elektrische Winkel bei Rastlagesuche mit "Stehende Welle und variabler Bestromungswinkel" nachgeführt wird.
Minimal: 1.0 [U/min], maximal: 59999.0 [U/min]
Default: 1.0 [U/min], wenn Parameter AngleRising =0.0
Eingang MaxAngle:
Einstellung des Fensters für zulässige mechanische Bewegung bei Rastlagesuche mit "Stehende Welle und variabler Bestromungswinkel" bevor Nachführung des elektrischen Winkels erfolgt.
Minimal: 0.05 [Grad], maximal: 360.00 [Grad]
Default: 8.00 [Grad], wenn Parameter MaxAngle =0.0
Eingang ErrLimitMechDeltaAngle:
Einstellung des Fensters für zulässige mechanische Bewegung bei Rastlagesuche mit "Stehende Welle und variabler Bestromungswinkel" bevor ein Fehler ausgelöst wird.
Minimal: 0.05 [Grad], maximal: 360.00 [Grad]
Default: 0.50 [Grad], wenn Parameter MaxAngle =0.0
Eingang Averaging0SpeedDetect:
Dieser Parameter wird zur Stillstandserkennung bei Rastlagesuche mit "Stehende Welle und variabler Bestromungswinkel" verwendet. Je höher sein Weit desto geringer darf die gemessene Bewegung des Motors sein.
Bedingung für Stillstand: Averaging0SpeedDetect x Delta_Phi /ms < MaxAngle.
Minimal: 1.0, maximal: 1024.0
Default: 100.0, wenn Parameter Averaging0SpeedDetect =0.0
Ausgang Done:
TRUE = Rastwinkelsuche ist ausgeführt. Antriebe Zustand wechselt von Betrieb Freigeben
auf Einschaltbereit.
FALSE = nicht aktiv.
Ausgang Moving:
TRUE: Rastwinkelsuche läuft
FALSE: nicht aktiv.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang CommandAborted:
TRUE: Abbruch durch ein anderes Motion Control Kommando, BM_Stop Kommando, Errorstop oder fehlender Betriebsbereitschaft an BM_Power.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden
Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.