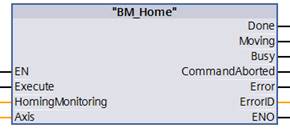
BM_Home
Beschreibung
Der Motion Control FC BM_Home referenziert die Antriebsachse mit der am Antrieb eingestellten Methode. Die Einstellung der Methode am Antrieb kann über Prodrive und/oder im Programm, mit den Baumüller Zusatz FCs BM_HomeInit, BM_HomeInitBlock erfolgen.
Achtung:
Die angegebene Ursprungsposition muss innerhalb der Verfahrstrecke
(Software-Endschalter1/2) liegen.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Flankensensitive Ausführung des Referenzfahrt |
|
HomingMonitoring |
Timer |
Referenzfahrt Zeit Überwachung Timer T |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Homing ist ausgeführt. Die Achse wechselt in den Zustand Standstill |
|
Moving |
BOOL |
Referenzfahrt läuft, Ziel nicht erreicht |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv. |
|
CommandAborted |
BOOL |
Abbruch durch ein Zeit Überwachung , BM_Stop oder Errorstop… |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Das Kommando BM_Home referenziert den Antrieb mit einer absoluten Position aus dem Aufrufzustand Standstill und wechselt in den Zustand Homing. Die angegebene Position muss im Bereich der Verfahrstrecke (Software-Endschalter 1/ Software-Endschalter 2) liegen. Der FC BM_Home kann mit BM_Stop abgebrochen werden. Die Homing Funktionalität kann während der Ausführung mit einer Applikationsüberwachungszeit (ApplicationTimeout) überwacht werden (siehe FCs BM_HomeInit... ). Diese Überwachung ist insbesondere bei langen Verfahrwegen mit Referenzschalter (HomeSwitch) sinnvoll. Ist die Applikationsüberwachungszeit Null, dann ist diese Funktionalität deaktiviert.
Flankensensitive Ausführung:
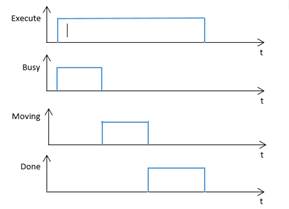
Zur Ausführung des Kommandos kann der Eingang Execute ein Zyklus TRUE sein. Anschließend wird das Kommando ausgeführt, das Ergebnis Done wird nur einen Zyklus lang gemeldet. wenn Eingang Execute = 1, Anschließend wird das Kommando ausgeführt, bis Done =1. Done wird zurückgestzt, wenn Eingang Execute =0.
Diagramm für Flankensensitive Ausführung:
Diagramm 1:
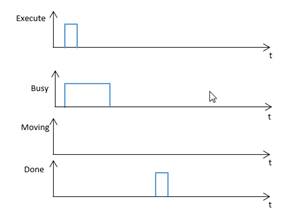
Diagramm 2:
Zustandskontrolle über BM_ReadStatus
Aus Zustand: Standstill.
Nach Zustand: Homing.
Hinweis:
Das Stoppen auf eine definierte Position ist nicht möglich, daher ist
gegebenenfalls nach einem Aufruf von BM_Stop mit BM_Home zu referenzieren.
Ein Befehl von "BM_Home " darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde. Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
Eingang Execute:
TRUE:
Flankensensitive Ausführung des Homing
FALSE: Keine Ausführung bzw. Reset der FC-Ausgänge, wenn Done bereits TRUE ist.
Achtung: Homing Start nur bei BM_ReadStatus Ausgang Parameter Standstill =1
Eingang HomingMonitoring:
Timer T für Referenzfahrt Zeit Überwachung.
Ausgang Done:
TRUE
: Homing ist ausgeführt. Antrieb wechselt vom Zustand Homing nach Standstill.
FALSE: Homing aktiv oder nicht möglich.
Ausgang Moving:
TRUE: Positionierungsposition noch nicht Erreicht bei Referenzfahrt Start,
Ziel noch nicht erreicht.
FALSE: nicht aktiv oder Referenzfahrt Beendet.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben.
FALSE: nicht aktiv.
Ausgang CommandAborted:
TRUE:
Abbruch durch BM_Stop, Errorstop oder fehlender Betriebsbereitschaft an BM_Power.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden
Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Hinweise:
Zeit Überwachung Abbruch: Error = 1 und ErrorID = 0
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.