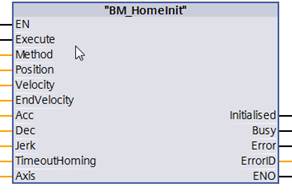
BM_HomeInit
Beschreibung
Das Motion Control Kommando BM_HomeInit ist eine Erweiterung des Motion Control Standards und initialisiert die Referenzfahrmethode "Referenzierung in der Verfahrstrecke" für das Motion Control Kommando BM_Home.
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Flankensensitive Ausführung |
|
Method |
INT |
Referenzfahrmethode |
|
Position |
REAL |
Referenzpunkt |
|
Velocity |
REAL |
Betrag der Zielgeschwindigkeit der Referenzierung |
|
EndVelocity |
REAL |
Betrag der Ende Zielgeschwindigkeit der Referenzierung, [Inc/ms] |
Acc |
REAL |
Betrag der Beschleunigung der Referenzierung, [Inc/ms²] |
|
Dec |
REAL |
Betrag der Verzögerung der Referenzierung; [Inc/ms²] |
|
Jerk |
REAL |
Betrag des Sprungs; [Inc/msec³] |
|
TimeoutHoming |
S5Time |
Überwachungszeit der Ausführung |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Initialised |
BOOL |
Homing Methode erfolgreich installiert |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Es wird der Referenzfahrmodus mit Eingang Methode am Antrieb eingestellt. Anschließend kann die Referenzfahrt mit dem Kommando BM_Home gestartet werden und der Antrieb mit entsprechender Referenzfahr-Methode referenziert werden.
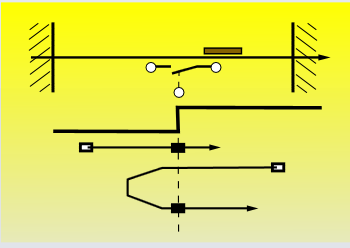
Referenzfahr-Methode Einstellung für Referenzfahrmodus
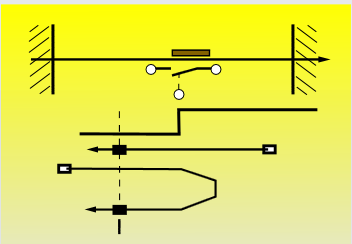
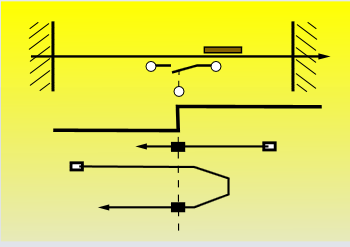
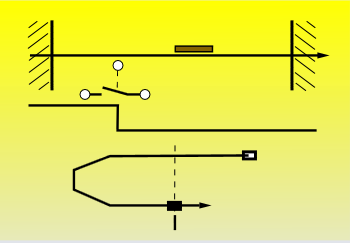
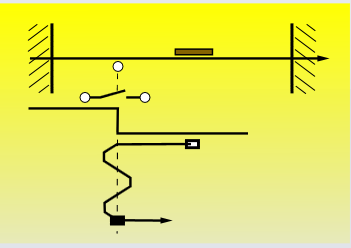
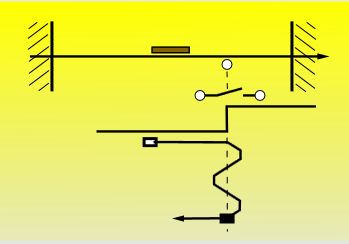
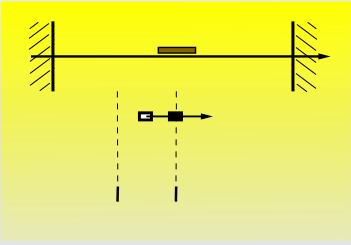
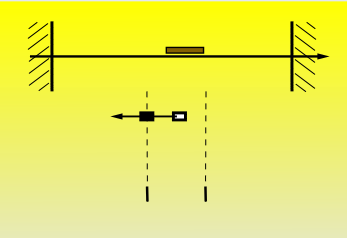
Referenzfahrt mit HomeSwitch
Methode = 3 (Positiver Schalter mit Nullimpuls, Linksdrehung)
Methode = 19 (Positiver Schalter ohne Nullimpuls, Linksdrehung)
Methode = 4 (Positiver Schalter mit Nullimpuls, Rechtsdrehung)
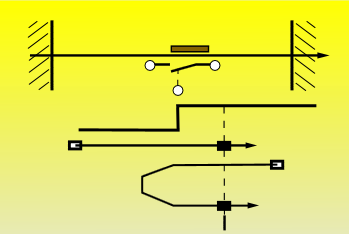
Methode = 20 (Positiver Schalter ohne Nullimpuls, Rechtsdrehung)
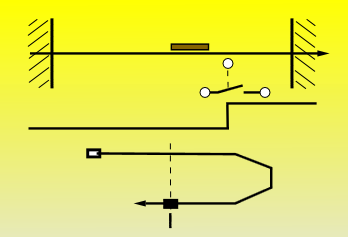
Methode = 5 (Negativer Schalter mit Nullimpuls, Rechtsdrehung)
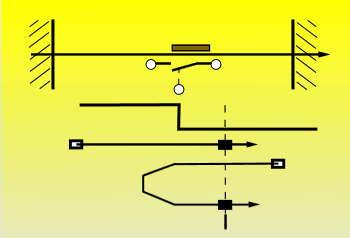
Methode = 21 (Negativer Schalter Ohne Nullimpuls, Rechtsdrehung)
Methode = 6 (Negativer
Schalter mit Nullimpuls, Linksdrehung)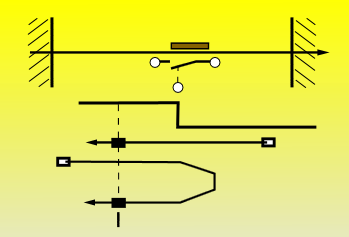
Methode = 22 (Negativer
Schalter Ohne Nullimpuls, Linksdrehung)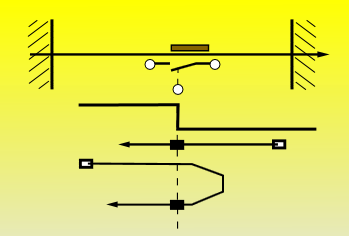
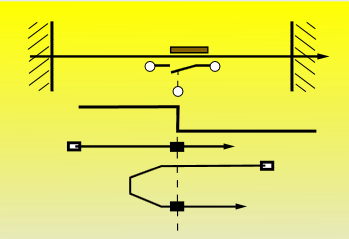
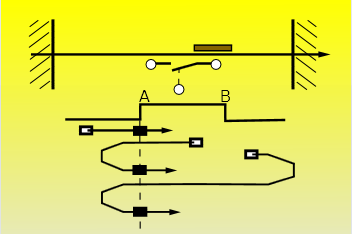
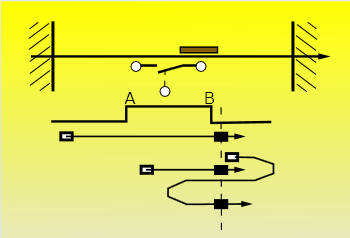
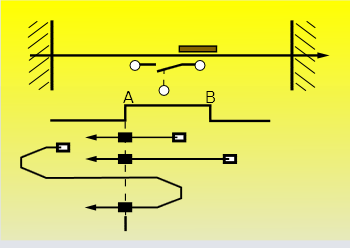
Methode = 7 (Schalter links von Flanke A, mit Nullimpuls, Rechtsdrehung)
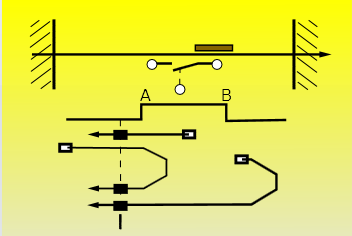
Methode = 23 (Schalter links von Flanke A, Ohne Nullimpuls, Rechtsdrehung)
Methode = 8 (Schalter rechts von Flanke A, mit Nullimpuls, Rechtsdrehung)
Methode = 24 (Schalter rechts von Flanke A, Ohne Nullimpuls, Rechtsdrehung)
Methode = 9 (Schalter links von Flanke B, mit Nullimpuls, Rechtsdrehung)
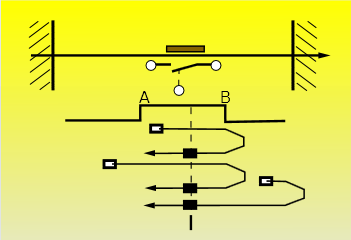
Methode = 25 (Schalter links
von Flanke B, ohne Nullimpuls, Rechtsdrehung)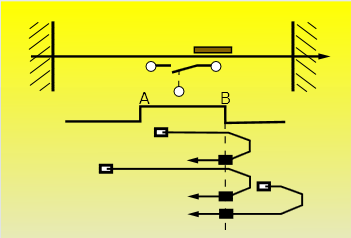
Methode = 10 (Schalter rechts von Flanke B, mit Nullimpuls, Rechtsdrehung)
Methode = 26 (Schalter rechts von Flanke B, ohne Nullimpuls, Rechtsdrehung)
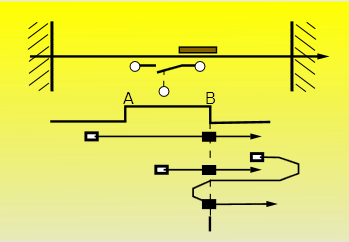
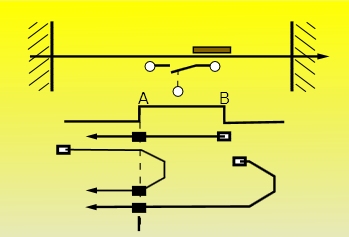
Methode = 11 (Schalter rechts von Flanke B, mit Nullimpuls, Linksdrehung)
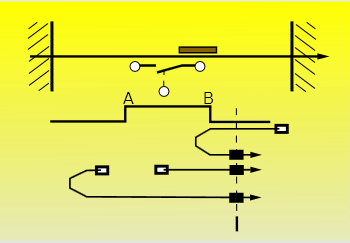
Methode = 27 (Schalter rechts von Flanke B, ohne Nullimpuls, Linksdrehung)
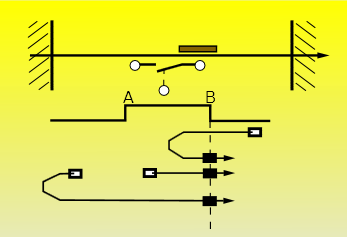
Methode = 12 (Schalter links von Flanke B, mit Nullimpuls, Linksdrehung)
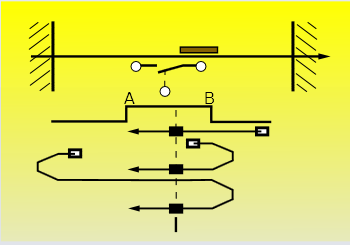
Methode = 28 (Schalter links von Flanke B, ohne Nullimpuls, Linksdrehung)
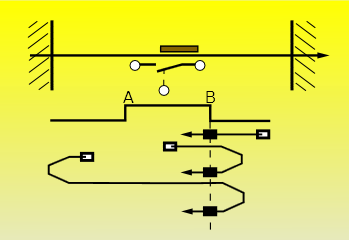
Methode = 13 (Schalter rechts von Flanke A, mit Nullimpuls, Linksdrehung)
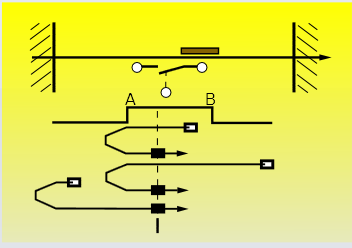
Methode = 29 (Schalter rechts von Flanke A, ohne Nullimpuls, Linksdrehung)
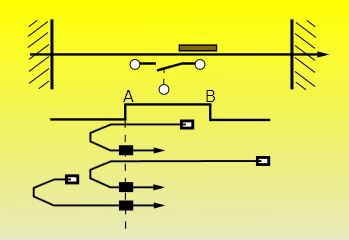
Methode = 14 (Schalter links von Flanke A, mit Nullimpuls, Linksdrehung)
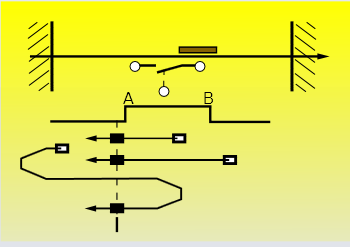
Methode = 30 (Schalter links von Flanke A, ohne Nullimpuls, Linksdrehung)
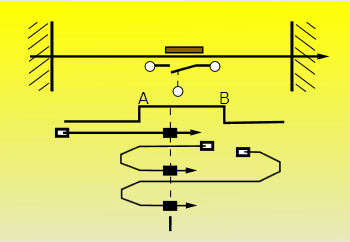
Referenzfahrt mit LimitSwitch
Methode = 1 (negativer Endschalter mit Nullimpuls)
Methode = 17 (negativer Endschalter ohne Nullimpuls)
Methode = 2 (positiver Endschalter mit Nullimpuls)
Methode = 18 (positiver Endschalter ohne Nullimpuls)
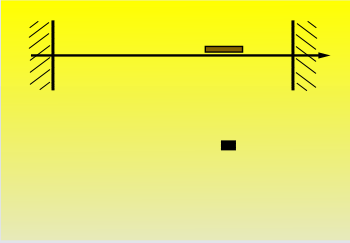
Referenzfahrt mit Nullimpulse
Methode = -1 oder 34 (Anfahren des Gebernullwinkels Rechtsdrehung)
Methode = -2 oder 33 (Anfahren des Gebernullwinkels Linksdrehung)
Referenzfahrt mit Referenzpunkt Setzen
Methode = -3 oder 35 (Anfahren des Gebernullwinkels Linksdrehung)
Im Anwenderprogramm kann die Einstellung der Referenzierung des Antriebs in den Zuständen Standstill, DiscreteMotion, ContinuousMotion, SynchronizedMotion zur Laufzeit geändert werden.
Flankensensitive Ausführung:
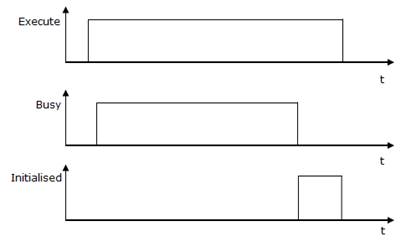
Zur Ausführung des Kommandos kann der Eingang Execute ein Zyklus TRUE sein. Anschließend wird das Kommando ausgeführt, das Ergebnis Initialised nur einen Zyklus lang gemeldet. wenn Eingang Execute = 1, Anschließend wird das Kommando ausgeführt, das Ergebnis Initialised =1. Initialised wird zurückgestzt, wenn Eingang Execute =0.
Diagramm für Flankensensitive Ausführung:
Diagramm 1:
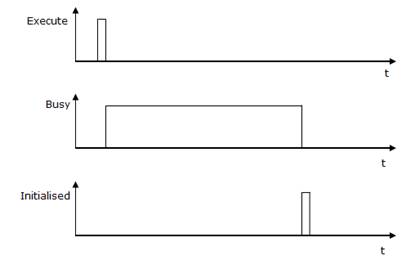
Diagramm 2:
Zustandskontrolle
über BM_ReadStatus
Aus Zustand: Standstill, DiscreteMotion, ContinuousMotion, SynchronizedMotion.
Empfohlene Task: OB1.
Hinweis:
Der FC BM_HomeInit überschreibt Antriebsparametrierungen, die Überservice Kommunikationsquelle, z.B. ProDrive eingestellt wurden.
Benötigte Digitale I/Os: positiver und negativer Schalter parametriert und verknüpft in ProDrive. Wenn die Methode auf 0 für Referenzierung gesetzt wird, wird Referenzfahrt –Methode auf geräteseitigen "Referenzpunkt setzen" (35 oder -3) am Antrieb eingestellt.
Ein Befehl von "BM_HomeInit " darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde. Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
Eingang Execute:
TRUE:
Flankensensitive Ausführung, die Eingangsparameter werden übernommen.
FALSE: Keine Ausführung oder Reset der FC-Ausgänge, wenn Initialised bereits
TRUE ist
zum Zeitpunkt Execute=FALSE.
Eingang Methode:
Referenzfahrt Methode des Antriebs
Eingang Position:
Referenzpunkt, Angabe als Betrag in Inkrementen
Eingang Velocity:
Angabe als Betrag in Inkrementen pro Millisekunden. Es handelt sich um die maximale Zielgeschwindigkeit der Bewegung des Antriebs.
Eingang EndVelocity:
Angabe als Betrag in Inkrementen pro Millisekunden. Es handelt sich um die maximale Ende Zielgeschwindigkeit der Bewegung des Antriebs.
Eingang Acc:
Positive Beschleunigung als Betrag in Inkrementen pro Millisekunden.
Minimal: 0.07 [Inc/ms²], maximal: 655.35 [Inc/ms²]
Default: 2.00 [Inc/ms²]
Eingang Dec:
Negative Beschleunigung als Betrag in Inkrementen pro Millisekunden.
Minimal: 0.07 [Inc/ms²], maximal: 655.35 [Inc/ms²]
Default: 2.00 [Inc/ms²]
Eingang Jerk:
Sprung der Beschleunigungen. Betrag in Inkrementen pro Millisekunden³.
Minimal: 0.07 [Inc/ms³], maximal: 655.35 [Inc/ms³]
Default: 0.25 [inc/ms³]
Eingang TimeoutHoming:
Angabe der
Überwachungszeit mit S5Time.
0: Aktivierung der Überwachung bei Aufruf von BM_Home deaktiv.
>0: Überwachung entsprechend der Angabe im Homing aktiv.
Ausgang Initialised:
TRUE :
Referenziermethode erfolgreich installiert.
FALSE : nicht möglich.
Ausgang Busy:
TRUE:
die
Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden
Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.