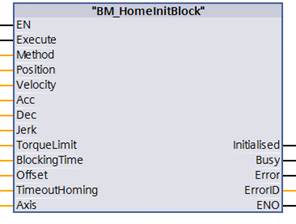
BM_HomeInitBlock
Beschreibung
Das Motion Control Kommando BM_HomeInitBlock ist eine Erweiterung des Motion Control Standards und initialisiert die Referenzfahrmethode "Referenzierung in der Verfahrstrecke" für das Motion Control Kommando BM_Home.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Flankensensitive Ausführung |
|
Method |
INT |
Referenzfahrmethode |
|
Position |
REAL |
Referenzpunkt |
|
Velocity |
REAL |
Betrag der Zielgeschwindigkeit der Referenzierung |
|
EndVelocity |
REAL |
Betrag der Ende Zielgeschwindigkeit der Referenzierung, [Inc/ms] |
|
Acc |
REAL |
Betrag der Beschleunigung der Referenzierung, [Inc/ms²] |
|
Dec |
REAL |
Betrag der Verzögerung der Referenzierung; [Inc/ms²] |
|
Jerk |
REAL |
Betrag des Sprungs; [Inc/ms³] |
|
TorqueLimit |
REAL |
Begrenzung des Drehmoments für die Referenzfahrt auf Anschlag,[%] |
|
BlockingTime |
REAL |
Blockierzeit zur Erkennung des Anschlags,[s] |
|
Offset |
REAL |
Verschiebung ausgehend von der Methode und Endschalteranbringung,[inc] |
|
TimeoutHoming |
S5Time |
Überwachungszeit der Ausführung |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Initialised |
BOOL |
Homing Methode erfolgreich installiert |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
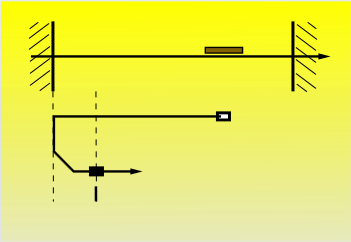
Es wird der Referenzfahrmodus "Referenzfahrt auf mechanischen Anschlag" am Antrieb eingestellt. Anschließend kann die Referenzfahrt mit dem Kommando BM_Home gestartet werden und der Antrieb auf einen mechanischen Anschlag referenziert werden.
Dazu wird je nach Referenzfahrt Method und Velocity der Antrieb auf den mechanischen Anschlag bewegt. Dabei wird das Drehmoment auf TorqueLimit begrenzt. Der mechanische Anschlag wird erkannt, wenn sich für die BlockingTime der Antrieb bei Drehzahl Null an der Stromgrenze befindet. Wurde der Anschlag erkannt wird an dieser Position der Referenzpunkt gesetzt und die Momentenbegrenzung auf TorqueLimit aufgehoben.
Im Anwenderprogramm kann die Einstellung der Referenzierung des Antriebs in den Zuständen Standstill, DiscreteMotion, ContinuousMotion, SynchronizedMotion zur Laufzeit geändert werden.
Flankensensitive Ausführung:
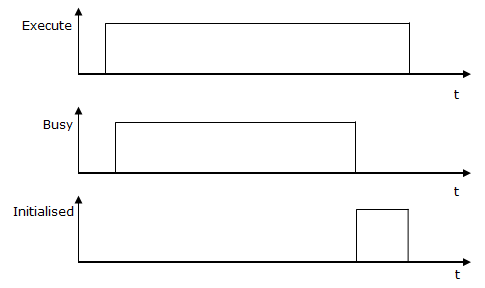
Zur Ausführung des Kommandos kann der Eingang Execute ein Zyklus TRUE sein. Anschließend wird das Kommando ausgeführt, das Ergebnis Initialised nur einen Zyklus lang gemeldet. wenn Eingang Execute = 1, Anschließende wird das Kommando ausgeführt, das Ergebnis Initialised =1. Initialised wird zurückgestzt, wenn Eingang Execute =0.
Diagramm für Flankensensitive Ausführung:
Diagramm 1:
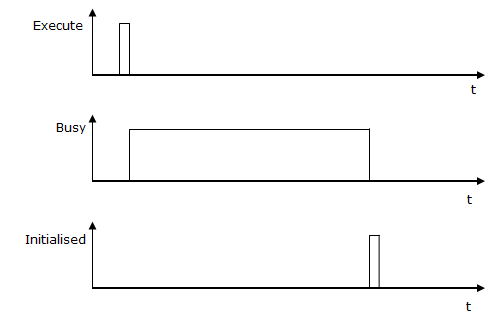
Diagramm 2:
Zustandskontrolle
über BM_ReadStatus:
Aus Zustand: Standstill, DiscreteMotion, ContinuousMotion, SynchronizedMotion.
Empfohlene Task: OB1.
Hinweis:
Der FC BM_HomeInitblock überschreibt Antriebsparametrierungen, die Überservice Kommunikationsquelle, z.B. ProDrive eingestellt wurden.
Benötigte Digitale I/Os: positiver und negativer Schalter parametriert und verknüpft in ProDrive. Wenn die Methode auf 0 für Referenzierung gesetzt wird, wird Referenzfahrt –Methode auf geräteseitigen "Referenzpunkt setzen" (35 oder -3) am Antrieb eingestellt.
Ein Befehl von "BM_HomeInitblock" darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde. Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
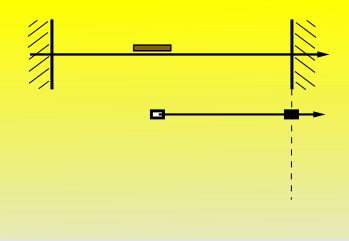
Referenzfahr-Methode Einstellung für Referenzfahrt auf mechanischen Anschlag
Methode = -10 (Anfahren des mechanischen Anschlags mit Nullimpuls, Linksdrehung)
Methode = -8 (Anfahren des mechanischen Anschlags ohne Nullimpuls, Linksdrehung)
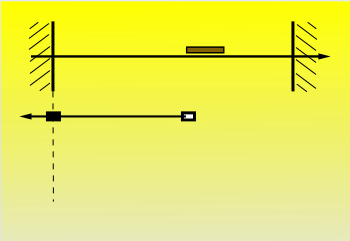
Methode = -9(Anfahren des mechanischen Anschlags mit Nullimpuls, Rechtsdrehung)
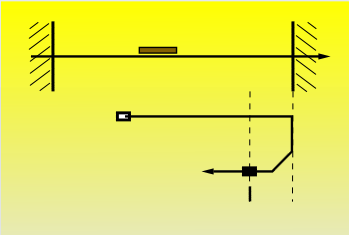
Methode = -7 (Anfahren des mechanischen Anschlags ohne Nullimpuls, Rechtsdrehung)
Eingang Execute:
TRUE
= Flankensensitive Ausführung, die Eingangsparameter werden übernommen.
FALSE = Keine Ausführung oder Reset der FC-Ausgänge, wenn Initialised bereits
TRUE ist zum Zeitpunkt Execute=FALSE.
Eingang Methode:
Referenzfahrt Methode des Antriebs
Eingang Position:
Referenzpunkt, Angabe als Betrag in Inkrementen
Eingang Velocity:
Angabe als Betrag in Inkrementen pro Millisekunden. Es handelt sich um die maximale Zielgeschwindigkeit der Bewegung des Antriebs.
Eingang EndVelocity:
Angabe als Betrag in Inkrementen pro Millisekunden. Es handelt sich um die maximale Ende Zielgeschwindigkeit der Bewegung des Antriebs.
Eingang Acc:
Positive Beschleunigung als Betrag in Inkrementen pro Millisekunden.
Minimal: 0.07 [Inc/ms²], maximal: 655.35 [Inc/ms²]
Default: 2.00 [Inc/ms²]
Eingang Dec:
Negative Beschleunigung als Betrag in Inkrementen pro Millisekunden.
Minimal: 0.07 [Inc/ms²], maximal: 655.35 [Inc/ms²]
Default: 2.00 [Inc/ms²]
Eingang Jerk:
Sprung der Beschleunigungen. Betrag in Inkrementen pro Millisekunden³.
Minimal: 0.07 [Inc/ms³], maximal: 655.35 [Inc/ms³]
Default: 0.25 [inc/ms³]
Eingang TorqueLimit:
Wert des begrenzten Drehmoments für die Referenzfahrt auf Block. Angabe in %/100 des maximalen Drehmomentes.
Eingang BlockingTime:
Zeit zum Erkennen des Anschlages bei Drehzahl = Null und Antrieb an Stromgrenze. Angabe in sec.
Dieser Wert muss kleiner sein als eventuell parametrierte Blockierüberwachungen am Antrieb.
Eingang TimeoutHoming:
Angabe der
Überwachungszeit mit S5Time.
0: Aktivierung der Überwachung bei Aufruf von BM_Home nicht aktiv.
>0: Überwachung entsprechend der Angabe im Homing aktiv.
Ausgang Initialised:
TRUE:
Referenziermethode erfolgreich installiert.
FALSE: Kommando aktiv oder nicht möglich.
Ausgang Busy:
TRUE:
die
Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden
Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x] "
Dabei ist "x" die Achsennummer des Antriebs.