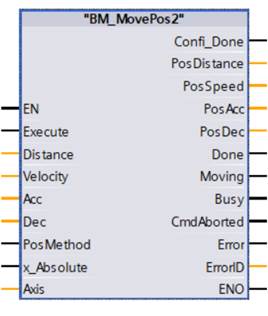
BM_MovePos2
Beschreibung
Der Motion Control Funktionsbaustein BM_MovePos2 führt eine kontrollierte Bewegung aus. Der neue Positionssollwert wird durch den eingestellten Positioniersatz der Lagezielvorgabe (entweder Relative oder Absolute) erreicht.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Ausführung der Funktion bei einer positiven Flanke |
|
Distance |
DINT |
Relative oder Absolute Distanz der Bewegung; [Inc] |
|
Velocity |
REAL |
Betrag der Geschwindigkeit der Zielpositionierung; [Inc/ms] |
|
Acc |
REAL |
Betrag der Beschleunigung innerhalb der Zielpositionierung; [Inc/ms²] |
|
Dec |
REAL |
Betrag der Verzögerung innerhalb der Zielpositionierung; [Inc/ms²] |
|
Method |
BOOL |
0: automatisch einstellen; 1: manuell einstellen: 118.10=4, 118.2(bit8=0) |
|
Absolute |
BOOL |
1: Absolute / 0: Relative |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Confi_Done |
BOOL |
Positionierungskonfiguration erfolgreich |
|
PosDistance |
DINT |
118.9 / inc; +/- oder 118.16 inc + |
|
PosSpeed |
UDINT |
118.11 / inc/ms |
|
PosAcc |
UDINT |
118.12 / inc/ms² |
|
PosDec |
UDINT |
118.13 / inc/ms² |
|
Done |
BOOL |
Zielposition erreicht. Der Antrieb wechselt in den Zustand Standstill |
|
Moving |
BOOL |
Positionierung gestartet und Ziel nicht erreicht. |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv. |
|
CommandAborted |
BOOL |
Abbruch durch ein anderes Motion Control Kommando, BM_Stop2 |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Der Funktionsbaustein BM_MovePos2 führt eine kontrollierte Positionierung abhängig vom, am Gerät eingestellten, Positionierungsmodus (Relative oder Absolute) durch. Dieser Modus kann über den Antriebsparameter 118.10 entweder automatisch über den Bausteineingang "Absolute", manuell über das Bedientool ProDrive oder über das Verwenden des Funktionsbausteins BM_Write eingestellt werden.
Mit Execute = TRUE erfolgt eine flankensensitive Ausführung, wobei
die Eingangswerte übernommen werden und die Ausgänge Parameter PosDistance, Pos
Speed, PosAcc und PosDec zyklisch an die Peripherie Adresse, die in "Axis" am
entsprechenden Antrieb eingestellt ist, geschrieben wird. Ein erneutes
Aufschalten des Kommandos erfordert ein FALSE nach TRUE Wechsel am Eingang
Execute, oder nach dem Aufschalten des Kommandos Execute wird ab der zweiten Positionierung
eine erneute Positionieränderung des Positionierzieles automatisch ausgeführt.
Ein Abbruch des aktiven Bewegungskommandos wird mit BM_Stop2 durchgeführt. Das Ausführen des Abbruchs wird am Ausgang CommandoAborted sichtbar.
Diagramm für positiven Flanke und neue Sollwert Ausführung:
Diagramm 1: positive Flanke Ausführung
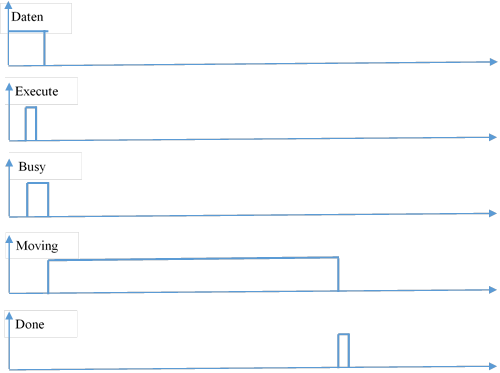
Diagramm 2: positive Flanke Ausführung
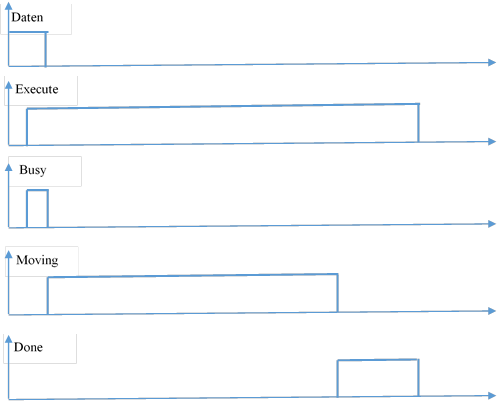
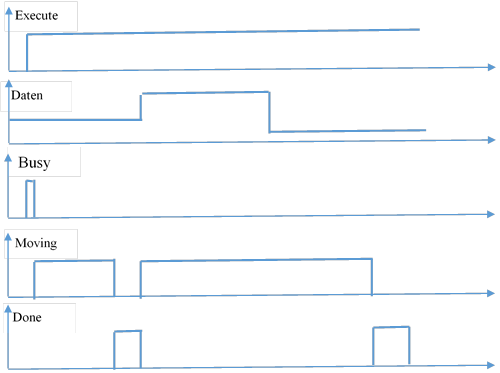
Diagramm3 : positive Flanke Ausführung und neue Sollwert Ausführung
Zustandskontrolle
über BM_ReadStatus:
Aus Zustand: Standstill,
DiscreteMotion, ContinuousMotion, SynchronizedMotion.
Nach Zustand: DiscreteMotion.
Empfohlene Task: OB1.
Hinweis:
Die resultierende Zielposition muss innerhalb der Positionierstrecke liegen und kann mit geräteseitigen, sowie Software-Endschalter begrenzt werden. Wird der Zustand DiscreteMotion in einen anderen Bewegungszustand, z. B. ContinuousMotion verlassen, so ist anschließend gegebenenfalls eine Referenzfahrt (BM_Home) durchzuführen.
Ein Befehl von "BM_MovePos2" darf nicht aktiviert werden, bevor ein Befehl eines anderen Funktionsbausteins noch nicht erfolgreich ausgeführt wurde.
Wenn Eingang Parameter PosMethod =0 eingestellt ist, darf der Execute Befehl des Bausteins "BM_MovePos2" bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1 nicht aktiviert werden. Bei auftretenden Problemen wird durch den Baustein BM_Reset zurückgesetzt.
Eingang Execute:
TRUE: Ausführung nach einer positiven Flanke.
1. die Eingangsparameter werden bei einer Ausführung von positiven Execute Flanke übernommen
2. die Eingangsparameter werden bei einer Änderung von Eingang Parameter Distance übernommen, wenn Eingang Parameter Execute = 1.
FALSE: Keine Ausführung.
Eingang Distance:
Vorzeichenbehaftete Angabe der relativen Distanz oder Absolute Position in Inkrementen, Bei Baumüller Antrieben entspricht eine Achsumdrehung einer Auflösung von 65536 Inkrementen, die auch Benutzereinheiten genannt werden.
Eingang Velocity:
Angabe als Betrag in Inkrementen pro Millisekunden. Es handelt sich um die maximale Geschwindigkeit der Zielpositionierung die nicht notwendigerweise erreicht werden muss.
Minimal: >1 [Inc/ms], maximal: 59999 [inc/ms]
Default: 10 [inc/ms]
Eingang Acc:
Positive Beschleunigung als Betrag in Inkrementen pro Millisekunden².
Minimal: 0.07 [Inc/ms²], maximal: 655.35 [Inc/ms²]
Default: 2.00 [Inc/ms²]
Eingang Dec:
Negative Beschleunigung als Betrag in Inkrementen pro Millisekunden.
Minimal: 0.07 [Inc/ms²], maximal: 655.35 [Inc/ms²]
Default: 2.00 [Inc/ms²]
Eingang Method:
Über Parameter Methode können Parameter 118.2, 118.10 und 109.1 durch den Baustein eingestellt werden, wenn am Eingang Method = 0 steht.
0: 118.2 bit 8 =0 : neuer Sollwert
118.10: relative oder absolute über Eingang Parameter Absolute
109.1: Betriebsart Positionierung
1: die Parameter 118.2 118.10 und 109.1 werden über BM_Write oder über die Bediensoftware ProDrive manuell eingestellt.
Eingang Absolute
Dieser Eingang Parameter wird nur aktiviert, wenn der Eingang Method =0 ist,
Absolute = 1: Absolute Positionierung
Absolute = 0: Relative Positionierung
Ausgang Confi_Done:
TRUE = Parameter
Einstellung für Lagezielvorgabe wurde erfolgreich ausgeführt.
FALSE = Kommando aktiv oder nicht möglich.
Ausgang PosDistance:
Der Parameter schreibt zyklisch auf die vordefinierte Peripherie Adresse des Antriebs.
Wenn Eingang Parameter Method =0 und Absolute =1, wird der Parameter 118.10 =0 im Gerät geschrieben. Dadurch wird automatisch eingestellt, dass die Positionierung absolut durchgeführt wird, der Eingang PosDistance wird mit der entsprechenden Zielposition auf den Parameter 118.9 geschrieben. Dieser muss im Siemens Projekt als zyklische Parameter konfiguriert und die entsprechende PLC Variable mit dem Eingang PosDistance verbunden werden.
Ist der Eingang Absolute =0, wird der Parameter 118.10 =4 im Gerät geschrieben. Dadurch wird automatisch eingestellt, dass die Positionierung relativ durchgeführt wird, der Eingang PosDistance wird mit der entsprechenden Zielposition auf den Parameter 118.16 geschrieben. Dieser muss im Siemens Projekt als zyklische Parameter konfiguriert und die entsprechende PLC Variable mit dem Eingang PosDistance verbunden werden
Wenn Eingang Parameter Method = 1, müssen alle Parameter manuell im Gerät eingestellt werden. Weitere Informationen dazu sind im Kapitel Lagezielvorgabe im Parameterhandbuch des entsprechenden Geräts hinterlegt.
Ausgang PosSpeed:
aktuelle Geschwindigkeit Sollwert Parameter 118.11 der Zielposition kann über Siemens Projekt als zyklische Parameter konfiguriert werden und entspricht PLC Variable mit PosSpeed verbinden, oder über ein Dummy Parameter mit PosSpeed verbinden, wenn diese Parameter im Geräte eingestellt und nicht geändert werden möchten.
Ausgang PosAcc:
Der aktuelle Beschleunigung Sollwert Parameter 118.12 der Zielposition kann über Siemens Projekt als zyklischer Parameter konfiguriert und die entsprechende PLC Variable mit dem Eingang PosAcc verbunden werden. Zusätzlich könnte der Parameter über einen Dummy Parameter mit PosAcc verbunden werden, wenn dieser Parameter im Gerät eingestellt und nicht geändert werden soll.
Ausgang PosDec:
Der aktuelle Verzögerungs Sollwert Parameter 118.13 der Zielposition kann über Siemens Projekt als zyklischer Parameter konfiguriert und die entsprechende PLC Variable mit dem Eingang PosDec verbunden werden. Zusätzlich könnte der Parameter über einen Dummy Parameter mit PosDec verbunden werden, wenn dieser Parameter im Gerät eingestellt und nicht geändert werden soll.
Ausgang Done:
TRUE = Positionierung
wurde ausgeführt.
FALSE = Kommando aktiv oder nicht möglich.
Ausgang Moving:
TRUE:
Zielposition der gestarteten Positionierung ist noch nicht erreicht
FALSE: nicht aktiv.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben ist aktiv.
FALSE: nicht aktiv.
Ausgang CommandAborted:
TRUE: Abbruch durch ein Motion Control Kommando von BM_Velocity während Positionierung Bewegung, BM_Stop2 Kommando, oder fehlender Betriebsbereitschaft an BM_Power.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer des angesteuerten bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.