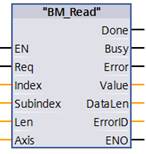
BM_Read
Beschreibung
Die Funktion FC BM_READ kann verwendet werden, um ein Parameter durch Bedarfsdaten Kommunikation von bmaXX Regler zu lesen
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Req |
BOOL |
TRUE= Start ein Parameter lesen FALSE= Beende ein Parameter lesen |
|
Index |
INT |
Parameter Index |
|
Subindes |
BYTE |
Parameter Subindex |
|
Len |
BYTE |
Parameter Type Wert |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Lesen ohne Fehler beendet |
|
Busy |
BOOL |
Lesen Status ist noch aktiv |
|
Errror |
BOOL |
Parameter Lesen Fehler; ErrorID ist gültig |
|
Value |
DWORD |
Wert eines Parameters |
|
DataLen |
BYTE |
Gesamt Daten Länge |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Hinweise:
Ein Befehl von "BM_Read" darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde.
Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
Eingang Req
Durch TRUE an Parameter Eingang REQ wird die Kommunikation gestartet.
Eingang Index
Der zu lesende Parameter Index Nummer.
Eingang Subindex
Der zu lesende Parameter Subindex Nummer.
LEN
Der Wert der zu lesende Parameter Datentype
|
LEN |
Datentyp |
Beschreibung von Byte Länge |
|
0x0001 |
BOOL |
1 |
|
0x0002 |
SINT |
1 |
|
0x0003 |
INT |
2 |
|
0x0004 |
DINT |
4 |
|
0x0005 |
USINT |
1 |
|
0x0006 |
UINT oder WORD |
2 |
|
0x0007 |
UDINT oder DWORD |
4 |
|
0x0008 |
FLOAT |
4 |
Ausgang Done:
TRUE: Lesen des Parameters ohne Fehler beendet. Die Ausgangswerte sind gültig.
FALSE: nicht aktiv
Ausgang Busy:
TRUE: Lesen Status ist noch aktiv.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Daten Kommunikation für Parameter Lesen vorhanden
Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang Value:
Zu lesendem Parameter Wert
Ausgang Len:
gesamte Datenlänge von Service Daten Kommunikation
Ausgang ErrorID:
Die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.