BM_ReadStatus
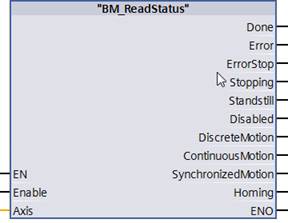
Beschreibung
Die FC BM_ReadStatus gibt den Antriebszustand der BM Motion Control Achse aus.
Achtung:
Das Ausführen von BM Motion Control Bewegungskommandos kann nicht aus dem
Zustand ErrorStop erfolgen und erfordert die Betriebsbereitschaft der Achse
über BM_Power.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Enable |
BOOL |
Aktualisierung der Statusausgabe zu jedem Aufruf |
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Ausgabe gültig, es ist immer nur ein Zustand aktiv |
|
Error |
BOOL |
Fehlerbit, Fehlerinfo ErrorID ist gültig |
|
ErrorStop |
BOOL |
Verriegelungszustand ErrorStop aktiv |
|
Stopping |
BOOL |
Antrieb wird aus der jeder Bewegung gestoppt. Ist solange aktiv, wie die letzte BM_Stop-Instanz am Eingang Execute = TRUE ist und wechselt dann in Standstill |
|
Standstill |
BOOL |
Geschwindigkeit ist Null. Mit BM_Power Status = TRUE sind die MC Bewegungskommandos betriebsbereit |
|
Disabled |
BOOL |
Antrieb Status nicht in der Betriebsbereitschaft |
|
DiscreteMotion |
BOOL |
Antrieb positioniert auf ein Positionsziel. Mit dem Abschluss wird zum Zustand Standstill gewechselt |
|
ContinuousMotion |
BOOL |
Antrieb bewegt sich mit einer aufgeschalteten Geschwindigkeit |
|
SynchronizedMotion |
BOOL |
Antrieb bewegt sich synchron zu einer Masterposition (Multi Axis Kommandos) |
|
Homing |
BOOL |
Aufruf ist mit BM_Home nur aus Standstill möglich und mit BM_Stop abzubrechen |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Das Kommando BM_ReadStatus gibt neutrale Zustände der Antriebsbewegung aus. Die ausgegebenen Zustände können als Transitionen (Schaltbedingung) für den Aufruf von Bewegungskommandos genutzt werden. z. B. BM_Home aus Standstill. In der Regel ist dies aber nicht notwendig, da die Bewegungskommandos in den Zuständen DiscreteMotion, ContinuousMotion, und SynchronizedMotion jederzeit von einem anderen Bewegungskommando zu unterbrechen sind.
Aufruf BM_ReadStatus:
Aus Zustand: Alle Zustände.
Aufruf Empfohlen: OB1.
Hinweis:
BM_ReadStatus ist besonders in der Einrichtungsphase der Applikation hilfreich,
und sollte in einem Motion Control Programm immer als Erstes mit BM_Power und
BM_Reset programmiert werden.
Eingang Enable:
TRUE : Aktualisierung der Statusausgabe zu jedem Aufruf.
FALSE: Keine Ausführung und wieder Einschaltbereitschaft.
Ausgang Done:
TRUE : Ausgänge gültig.
FALSE: Reset aktiv oder nicht möglich.
Ausgang Error:
TRUE : Fehler aktiv.
FALSE: Kein Fehler aktiv.
Ausgang Errorstop:
TRUE : Aktiv.
FALSE: nicht aktiv.
Ausgang Stopping:
TRUE : Aktiv.
FALSE: nicht aktiv.
Ausgang Standstill:
TRUE : Aktiv.
FALSE: nicht aktiv.
Ausgang Disabled:
TRUE = Aktiv.
FALSE = nicht aktiv.
Ausgang DiscreteMotion:
TRUE : Aktiv.
FALSE: nicht aktiv.
Ausgang ContinuousMotion:
TRUE : Aktiv.
FALSE: nicht aktiv.
Ausgang SynchronizedMotion:
TRUE : Aktiv.
FALSE: nicht aktiv.
Ausgang Homing:
TRUE: aktiv.
FALSE: nicht aktiv.
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.
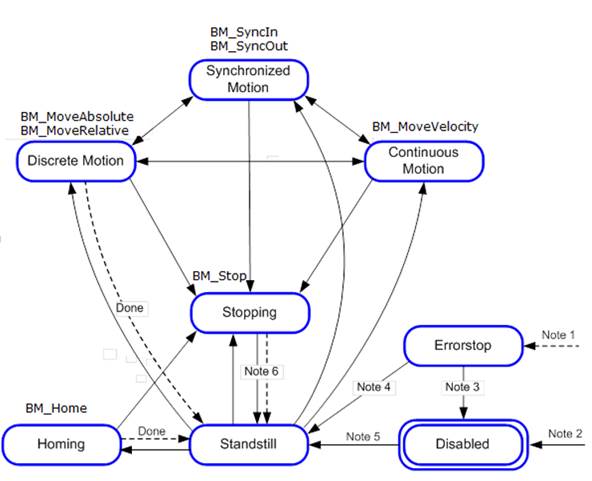
Abbildung: Übersicht der Zustandsmaschine des Motion Controls
Note 1: Aus jedem Zustand. Ein Fehler in der Achse ist aufgetreten.
Note 2: Aus jedem Zustand. BM_Power. Enable = FALSE und es gibt keinen Fehler in der Achse
Note 3: BM_Reset AND BM_Power.Status = FALSE
Note 4: BM_Reset AND BM_Power.Status = TRUE AND BM_Power.Enable = TRUE
Note 5: BM_Power.Enable = TRUE AND BM_Power.Status = TRUE
Note 6: BM_Stop.Done = TRUE AND BM_Stop.Execute = FALSE