BM_Reset
Beschreibung
Über den Motion Control FC BM_Reset wird versucht ein Reset durchzuführen um den Antrieb vom Verriegelungszustand Errorstop nach Standstill zu schalten. Eine eventuell vorhandene Fehlerquelle ist zuvor abzustellen, und mit BM_Reset können alle relevanten Fehlerzustände quittiert werden.
Achtung:
Der Verriegelungszustand Errorstop wird nach jedem Abschalten der
Betriebsbereitschaft an BM_Power (Enable = FALSE oder Schnellhalt)
oder bei anstehenden Antriebsfehler eingenommen. Anstehende Fehlereinträge des
Antriebes können mit Ausführung dieses FC zurückgesetzt werden.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
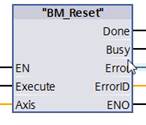
Execute |
BOOL |
Reset durchführen TRUE = Reset-Versuch |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
TRUE = Reset durchgeführt |
|
Busy |
BOOL |
Antrieb Fehler Reset noch aktiv |
|
Error |
BOOL |
Nicht benutzt |
|
ErrorID |
DWORD |
Nicht benutzt |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Das Kommando BM_Reset versucht einen Reset durchzuführen um die Antriebsachse aus dem Verriegelungszustand Errorstop nach Standstill zu schalten. Aus Standstill ist alle Motion Control Bewegungskommandos aufrufbar. Der Reset wird für den FC BM_Power ausgeführt für eine erneute Betriebsbereitschaft nach Errorstop. Bei anstehenden Fehlereinträgen wird der Reset für den Antrieb ausgeführt. Der FB BM_Reset kann beliebig oft instanziiert werden.
Flankensensitive
Ausführung:
Zur Ausführung des Kommandos muss der Eingang Execute nur einen Zyklus TRUE
sein. Anschließend wird das Kommando ausgeführt, das Ergebnis Done einen Zyklus
lang gemeldet und das Kommando im nächsten Zyklus mit einem Reset versehen.
Zustandskontrolle
über BM_ReadStatus:
Aus Zustand: Errorstop.
Nach Zustand: Disabled.
Empfohlene Task: OB1.
Hinweis:
Die Durchführung eines Reset kann bei fatalen Antriebsfehlern sofort wieder zu
einem Errorstop führen. Der Reset Vorgang muss dann nach Abschalten der
Fehlerquelle wiederholt werden.
Eingang Execute:
TRUE = Flankensensitive Ausführung.
Ausgang Done:
TRUE = Antrieb Fehler zurückgesetzt, das Ergebnis Done meldet nur einen Zyklus lang.
Ausgang Busy:
TRUE: Reset aktiv oder nicht möglich.
FALSE: Kein Reset aktiv.
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.
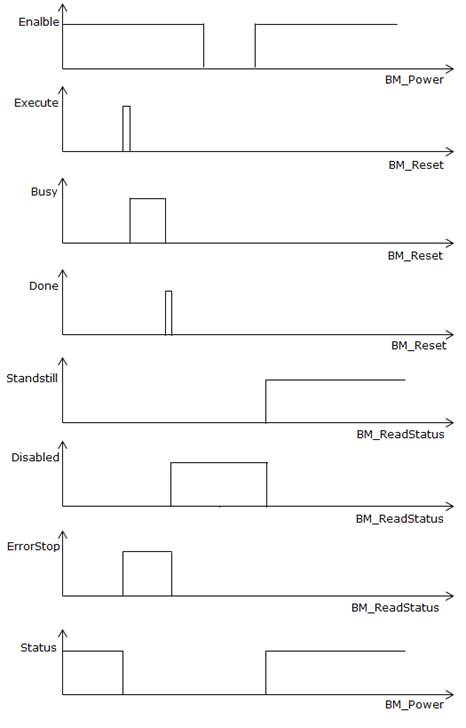
BM_ReadStatus und BM_Power Reaktion Diagramm bei Fehler zurücksetzen