BM_Stop
Beschreibung
Der Motion Control FC BM_Stop stoppt die Antriebsachse aus den
Antriebszuständen:
Homing, Discrete Motion, Continuous Motion und Synchronized Motion.
Achtung:
Das Ausführen Bewegungskommandos von Synchronized Motion im Zustand Stopping
ist nicht möglich.
|
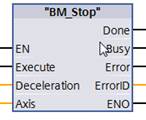
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Steigende Flanke startet das Stoppen. |
|
Deceleration |
REAL |
Maximale Verzögerung zum Stoppen der Achse; Default [Inc/ms²] |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Stop ist ausgeführt Done = TRUE Solange bei Execute = TRUE ist. |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; |
|
ErrorID |
WORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Das Kommando BM_Stop stoppt den Antrieb aus den Zuständen Homing, DiscreteMotion, ContinuousMotion, und SynchronizedMotion. Zum Stoppen wird die Achse in den Zustand Stopping geschaltet. Sobald die Achse gestoppt ist und der Eingang Execute = FALSE ist, wird die Achse in den Zustand Standstill geschaltet.
Flankensensitive
Ausführung:
Zur Ausführung des Kommandos muss der Eingang Execute von 0 auf 1 sein.
Anschließend wird das Kommando ausgeführt und das Ergebnis Done meldet bei
Eingang Execute = TRUE.
Zustandsmeldung über BM_ReadStatus:
Aus Zustand: Standstill, Homing, DiscreteMotion, ContinuousMotion und SynchronizedMotion.
Nach Zustand: Stopping Standstill.
Hinweis:
Das Stoppen auf eine definiert Position ist nicht möglich.
Ein Befehl von "BM_Stop" darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde.
Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
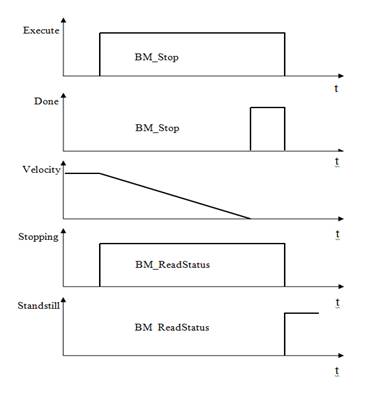
Eingang Execute:
Steigende Flanke (FALSE -> TRUE) startet das Kommando BM_Stop. Die Achse wird in den Antriebszustand Stopping geschaltet und gestoppt.
Die Achse bleibt in dem Antriebszustand Stopping bis die Achse gestoppt bei Eingang Execute = TRUE, anschließend ist der Eingang Execute = FALSE und die Achse wechselt den Antriebszustand von Stopping auf Standstill
Siehe Beispiel 1
Eingang Deceleration:
Verzögerung des Antriebs, Auflösung: Inc/ms².
BM_Velocity: (Drehzahl Regelung)
Speed Norm =3276 [Inc/ms] entsprechend max. Drehzahl
Bremszeit = 3276 [Inc/ms] / Deceleration.
Deceleration minimal: 0.00546[Inc/ms²]
BM_MoveAbsolute / BM_MoveRelative / BM_Home:
Deceleration minimal: 0.07 Inc/ms²
Deceleration maximal: 655.35 Inc/ms²
Umrechnung auf U/s² bei Inc / ms²:
Verzögerung [U/s²] =
Degeneration [Inc / ms²] * 1 [Umdrehung] / 65536 [Inc] * 1000 000[ms²] / 1 s²
Ausgang Done:
Done = TRUE: Stopp ist ausgeführt bei Eingang Execute = TRUE.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.
Beispiel 1: Achse wird mit BM_Stop gestoppt – und der Eingang Execute bleibt TRUE