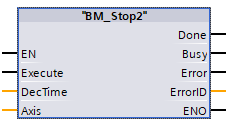
BM_Stop2
Beschreibung
Der Motion Control FC BM_Stop2
stoppt die Antriebsachse aus den Antriebszuständen:
Homing, Discrete Motion von BM_MovePos2, Continuous Motion von BM_Velocity2 und
Synchronized Motion.
Achtung:
Das Ausführen des Bewegungskommandos von Synchronized Motion im Zustand Stopping
ist nicht möglich.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Steigende Flanke startet das Stoppen. |
|
DecTime |
REAL |
Verzögerungszeit zum Stoppen für BM_Velocty2; |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Stop ist ausgeführt Done = TRUE Solange bei Execute = TRUE ist. |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; |
|
ErrorID |
WORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Das Kommando BM_Stop2 stoppt den Antrieb aus den Zuständen Homing, DiscreteMotion mit BM_MovePos2, ContinuousMotion mit BM_Velocity2, und SynchronizedMotion. Zum Stoppen wird die Achse in den Zustand Stopping geschaltet. Sobald die Achse gestoppt ist und der Eingang Execute = FALSE ist, wird die Achse in den Zustand Standstill geschaltet.
Flankensensitive
Ausführung:
Zur Ausführung des Kommandos muss der Eingang Execute von 0 auf 1 sein.
Anschließend wird das Kommando ausgeführt und das Ergebnis Done meldet bei
Eingang Execute = TRUE.
Zustandsmeldung über BM_ReadStatus:
Aus Zustand: Standstill, Homing, DiscreteMotion, ContinuousMotion, SynchronizedMotion.
Nach Zustand: Stopping Standstill.
Hinweis:
Das Stoppen auf eine definiert Position ist nicht möglich.
Ein Befehl von "BM_Stop2" darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde.
Wenn ein Fehler bei der Kommando Durchführung muss der Fehler durch BM_Reset zurücksetzen.
Eingang Execute:
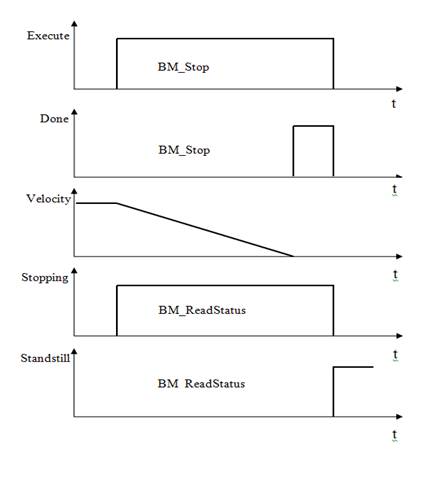
Steigende Flanke (FALSE -> TRUE) startet das Kommando BM_Stop. Die Achse wird in den Antriebszustand Stopping geschaltet und gestoppt.
Die Achse bleibt in dem Antriebszustand Stopping bis die Achse gestoppt bei Eingang Execute = TRUE, anschließend ist der Eingang Execute = FALSE und die Achse wechselt den Antriebszustand von Stopping auf Standstill
Siehe Beispiel 1
Eingang DecTime:
DecTime ist nur Verzögerungszeit von BM_Velocity2
Default: 1000[ms]
Minimal: 1[ms]
Maximal: 65000[ms]
DecTime hat kein Beeinfluss für BM_MovePos2 und BM_Home.
Die Verzögerung von BM_Stop2 bei FC BM_MovePos2 und BM_Home ist dieselbe Verzögerung des FCs
Ausgang Done:
Done = TRUE: Stopp ist ausgeführt bei Eingang Execute = TRUE.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.
Beispiel 1: Achse wird mit BM_Stop gestoppt – und der Eingang Execute bleibt TRUE