BM_Velocity
Beschreibung
Das BM Motion Control Kommando BM_Velocity setzt eine Endlosbewegung mit einer spezifizierten Geschwindigkeit um.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
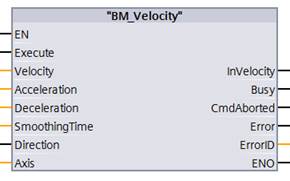
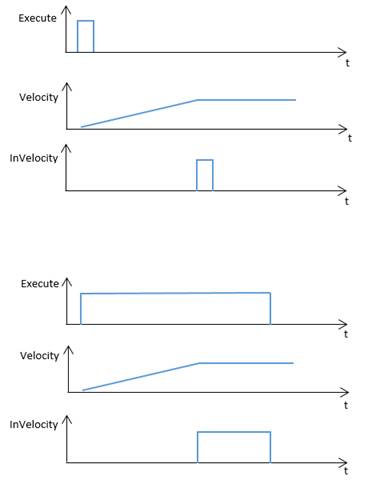
Execute |
BOOL |
Flankensensitive Ausführung |
|
Velocity |
REAL |
Betrag der Zielgeschwindigkeit mit Vorzeichen [Inc/ms] |
|
Acceleration |
REAL |
Betrag der Beschleunigung innerhalb der Zielpositionierung |
|
Deceleration |
REAL |
Betrag der Verzögerung innerhalb der Zielpositionierung [Inc/ms²] |
|
SmoothingTime |
INT |
Verschliff Zeit, [ms] |
|
Direction |
BOOL |
Bewegungsrichtung |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
InVelocity |
BOOL |
Zielgeschwindigkeit erreicht |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv |
|
CommandAborted |
BOOL |
Abbruch durch ein anderes Motion Control Kommando, BM_Stop oder Errorstop |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daen |
Beschreibung
Das Kommando BM_MoveVelocity führt eine Geschwindigkeitsvorgabe durch. Das Kommando schaltet die Achse in den Zustand ContinuousMotion und schließt mit InVelocity = TRUE und verbleibt im Zustand ContinuousMotion, solange nicht ein anderes Bewegungskommando geschaltet wird. Mit Execute = TRUE erfolgt eine flankensensitive Ausführung, wobei die Eingangswerte übernommen werden und das Kommando an dem an Axis definierten Antrieb umgesetzt wird. Ein erneutes Aufschalten des Kommandos erfordert ein FALSE nach TRUE Wechsel am Eingang Execute, wobei dieser Wechsel zur Ausführungszeit des Kommandos durchgeführt werden kann.
Bewegungskommando:
Die flankensensitive Ausführung bewirkt einen Abbruch des aktiven Bewegungskommandos. Die Ausführung wird mit BM_Stop, fehlender Betriebsbereitschaft oder Errorstop abgebrochen. Bei der Ergebnismeldung ist immer nur eines der Ausgangsbits InVelocity, CommandAborted, Busy oder Error aktiv.
Flankensensitive Ausführung:
Zur Ausführung des Kommandos muss der Eingang Execute ein Zyklus TRUE sein. Anschließend wird das Kommando ausgeführt, das Ergebnis InVelocity werde gemeldet, wenn Zielgeschwindigkeit erreicht wurde.
Zustandskontrolle
über BM_ReadStatus:
Aus Zustand: Standstill, DiscreteMotion, ContinuousMotion, SynchronizedMotion.
Nach Zustand: ContinuousMotion.
Empfohlene Task: OB1.
Hinweis:
Ein aktives Kommando BM_MoveVelocity kann von einem Positionierkommando nach
DiscreteMotion unterbrochen werden. Die Positionierung erfolgt von der
aktuellen Ist-position des Antriebs. Alternativ kann mit BM_Stop ein Stopping
durchgeführt werden mit anschließenden Homing über BM_Home.
Ein Befehl von "BM_Velocity" darf nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch nicht erfolgreich ausgeführt wurde.
Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
Eingang Execute:
TRUE: Flankensensitive Ausführung, die Eingangsparameter werden übernommen.
FALSE: Keine Ausführung.
Eingang Velocity:
Angabe als Betrag in Inkrementen pro Millisekunden. Es handelt sich um die Zielgeschwindigkeit; mit dem Ausgang InVelocity = TRUE erreicht wird.
Beispiel Geschwindigkeiten
|
U/min |
Inc/ms |
|
3000 |
3276 |
|
2000 |
2184 |
|
1000 |
1092 |
Eingang Acceleration:
Positive Beschleunigung als Betrag in Inkrementen pro Millisekunden², umgerechnet im
bmaxx Regler als Millisekunden für entsprechende max. Drehzahl des Antriebs.
Beschleunigungszeit: 3276 [Inc/ms] / Acceleration.
Acceleration minimal: 0.00546[Inc/ms²]
Eingang Deceleration:
Negative Beschleunigung als Betrag in Inkrementen pro Millisekunden², umgerechnet im
bmaxx Regler als Millisekunden für entsprechende max. Drehzahl des Antriebs.
Verzögerungszeit = 3276 [Inc/ms] / Deceleration.
Deceleration minimal: 0.00546[Inc/ms²]
Eingang SmoothingTime:
Verschliff Time für die Beschleunigung, Verz&öuml;gerung. Betrag in Millisekunden.
Eingang Direction:
Angabe der Bewegungsrichtung mit BOOL.
FALSE: Positive Bewegungsrichtung.
TRUE : Negative Bewegungsrichtung.
Ausgang InVelocity:
TRUE: Zielgeschwindigkeit erreicht. Achse verbleibt im Zustand ContinuousMotion.
FALSE : nicht aktiv.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang CommandAborted:
TRUE: Abbruch durch ein anderes Motion Control Kommando, BM_Stop Kommando, Errorstop oder fehlender Betriebsbereitschaft an BM_Power.
FALSE: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden
Info an ErrorID gültig und Error Info. siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x]"
Dabei ist "x" die Achsennummer des Antriebs.