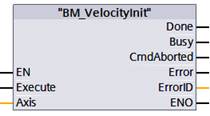
BM_VelocityInit
Beschreibung
Das BM_VelocityInit liest Modus(Parameter 110.2) des Reglers, um eine Einstellungsinformation dieses Regler Parameters an BM_Velocity weiter zu geben, damit dieser Parameter Einstellung bei aktive von BM_Velocity nicht verloren geht.
|
Parameter Eingang |
Datentyp |
Beschreibung |
|
Execute |
BOOL |
Flankensensitive Ausführung |
|
Parameter Ausgang |
Datentyp |
Beschreibung |
|
Done |
BOOL |
Erfolg |
|
Busy |
BOOL |
Parameter Lesen/Schreiben aktiv |
|
CommandAborted |
BOOL |
Ohne Funktion |
|
Error |
BOOL |
Parameter Lesen/Schreiben Fehler; ErrorID ist gültig |
|
ErrorID |
DWORD |
Kommunikation ErrorID-Siemens Fehlerliste |
|
Parameter Ein- und Ausgang |
Datentyp |
Beschreibung |
|
Axis |
CPU1500_BM_AXIS_REF |
BM Motion Control Achse Referenz Daten |
Beschreibung
Das Kommando BM_Velocity führt eine Geschwindigkeitsvorgabe durch, das Parameter 110.2 durch BM_Velocity Bit 5 auf 1 und Bit 4 auf 0 gesetzt. Wenn ohne Information von BM_VelocityInit werde auch andere Bits dieses Parameters auf 0 gesetzt.
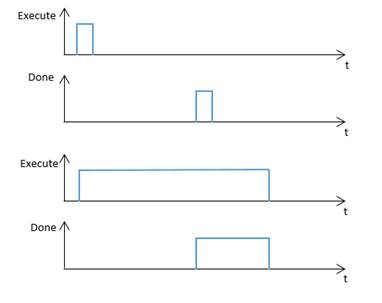
Flankensensitive Ausführung:
Zur Ausführung des Kommandos kann der Eingang Execute ein Zyklus TRUE sein. Anschließend wird das Kommando ausgeführt, das Ergebnis Done nur einen Zyklus lang gemeldet. Wenn Eingang Execute = 1, Anschließend wird das Kommando ausgeführt, das Ergebnis Done =1. Done wird zurückgesetzt, wenn Eingang Execute =0.
Diagramm für Flankensensitive Ausführung:
Zustandskontrolle:
Kommando
sollte nicht aktiviert werden bei alle "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active
=1, Error durch BM_Reset zurücksetzen,
Empfohlene Task: OB1.
Hinweis:
Ein Befehl von "BM_VelocityInit"
darf
nicht aktiviert werden, bevor einem Befehl von andere Funktion Bausein noch
nicht erfolgreich ausgeführt wurde.
Und Kommando sollte nicht aktiviert werden bei "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, Error durch BM_Reset zurücksetzen.
Eingang Execute:
TRUE: Flankensensitive Ausführung.
FALSE: nicht aktiv.
Ausgang Done:
TRUE: Kommando Erfolg durchgeführt.
FALSE : nicht aktiv.
Ausgang Busy:
TRUE: die Service Kommunikation für Parameter Lesen/Schreiben aktiv.
FALSE: nicht aktiv.
Ausgang CommandAborted: nicht aktiv.
Ausgang Error:
TRUE: ein Fehler bei Service Kommunikation für Parameter Lesen/Schreiben vorhanden
Info an ErrorID gültig und Error Info. Siehe S7 Beschreibung.
FALSE: Kein Fehler aktiv.
Ausgang ErrorID:
Die Information von Service Kommunikation Fehler(genaue Info. siehe S7 Beschreibung)
Ein- und Ausgang Axis:
Ein-/Ausgang Parameter Axis ist Nummer von angesteuerte bmaXX Antrieb Gerät.
Am Ein- und Ausgang Axis wird die BM Motion Control Referenz vom Type CPU1500_BM_AXIS_REF angeschlossen. Bei der Programmierung mit der Datenbausteinvorlage "DB5" wird die Variable wie folgt verwendet: "BM.AXIS[x] "
Dabei ist "x" die Achsennummer des Antriebs.