BM_ReadAxisError
Description
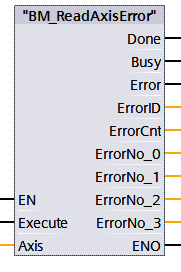
This FC BM_ReadAxisError for BM Motion Control is used to read the axis errors.
|
Parameter Input |
Data Type |
Description |
|
Execute |
BOOL |
Increasing edge start the reading of the extended status of the axis. |
|
Parameter Output |
Data Type |
Description |
|
Done |
BOOL |
The reading of the extended status was completed without errors |
|
Busy |
BOOL |
Reading of the extended status is still active |
|
Error |
BOOL |
Parameter Read/Write error; ErrorID is valid |
|
ErrorID |
DWORD |
Communication ErrorID Siemens error list |
|
ErrorCnt |
WORD |
Number of drive errors |
|
ErrorNO_0 |
DWORD |
1. Error message Number of drive |
|
ErrorNO_1 |
DWORD |
2. Error message Number of drive |
|
ErrorNO_2 |
DWORD |
3. Error message Number of drive |
|
ErrorNO_3 |
DWORD |
4. Error message Number of drive |
|
Parameter Input and output |
Data Type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
Call up BM_ReadStatus
from status: all states.
Recommended call up is: OB1.
Edge-sensitive version:
Rising edge at Execute begins to read the extended status of the drive.
If reading was completed without errors the output Done is set to TRUE and the
status information at the outputs are valid.
Note:
A command from "BM_ReadAxisError" must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with "BM_Reset". Function block command will be executed successfully at
"BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Execute:
If the edge rises at Execute the reading of the status begins.
Output Done:
TRUE: Reading status completed without errors. The output values are valid.
FALSE: Not active.
Output Busy:
TRUE: The reading of the status still is active.
FALSE: Not active.
Output Error:
TRUE: An error at Service Communication for the Parameter Read/Write is existent.
Refer to S7 Description for information on the valid ErrorID and the error information.
FALSE: No error active.
Output ErrorID:
The information of Service Communication Error (more details – refer to S7 description)
Output ErrorCnt:
Number of errors message of the drive.
Output ErrorNo_0:
Current error message number of the drive.
Output ErrorNo_1:
2. Error message number of the drive.
Output ErrorNo_2:
3. Error message number of the drive.
Output ErrorNo_3:
4. Error message number of the drive.
Input and output Axis:
UDT type symbolic BM Motion Control axis variable.
When programming with the template data module DB5 (symbolic "BM") the following symbol text must be written: "BM".AXIS[x] (x is the number of drive axis).