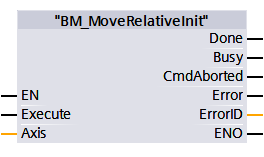
BM_MoveRelativeInit
Description
The BM_MoveRelativeInit reads the controller mode (parameter 118.2), to transmit a setting information of this controller parameter to BM_MoveRelative, so that this parameter setting is not dropped at activated BM_MoveRelative.
|
Parameter input |
Data type |
Description |
|
Execute |
BOOL |
Edge-sensitive execution |
|
Parameter input |
Data type |
Description |
|
Done |
BOOL |
Command successfully executed |
|
Busy |
BOOL |
Parameter Read/write activated or positioning started and target was not reached |
|
CommandAborted |
BOOL |
No function |
|
Error |
BOOL |
Parameter Read/write error; ErrorID is valid |
|
ErrorID |
DWORD |
Communication ErrorID Siemens error list |
|
Parameter in and output |
Data type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
Description
The command BM_MoveRelative carries out a controlled relative positioning originating from the parameter 118.2 by BM_MoveRelative
Bit 4 (starting the positioning for the start bit in the control word bit 4) is set to 1. If there is no information of BM_MoveRelativeInit the other bits of this parameter are set to 0, as well.
Edge-sensitive execution:
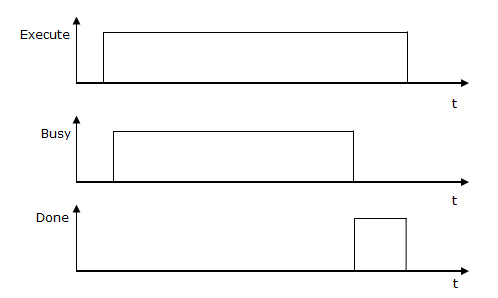
To execute the command the input Execute can be one cycle TRUE. Then the command is executed, the result Done is displayed for one cycle (see diagram 1). The command is executed, as long as the input Execute =1. When the command is finished, the result Done = 1. Done = 1 is reset if the input Execute = 0. (see diagram 2)
Diagram for edge-sensitive execution:
Diagram 1:
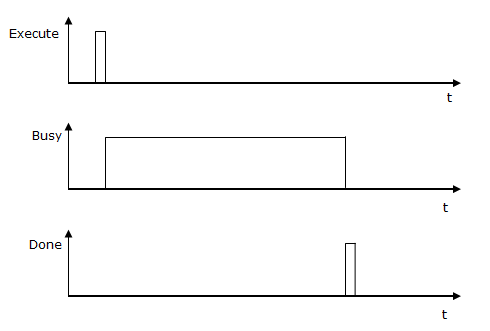
Diagram2:
Status control:
Command is not supposed to be activated at all "BM".AXIS[x].DRIVE.BM_AXIS_STATUS.ParmRW_Active =1, reset error by BM_Reset
Recommended task: OB1.
Note:
A command from "BM_MoveRelativeInit" must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with "BM_Reset". Function block command will be executed successfully at
"BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Execute:
TRUE: Edge-sensitive execution.
FALSE: No execution.
Output Done:
TRUE
= Command is executed.
FALSE = Command activated or not possible
Output Busy:
TRUE:
The service communication for Read/write parameter is activated or the target
position was not reached yet during a started positioning.
FALSE: Not activated.
Output CommandAborted:
No function
Output Error:
TRUE: There is an error at service communication of the Read/write parameter. Information at ErrorID is valid and error information refer to S7 description
FALSE: No error activated.
Output ErrorID:
The information of service communication error (detailed information refer to S7 description)
In and output Axis:
Symbolic BM Motion Control axis variable of a UDT type.
It is to be written with the following symbol text during the programming with the data component DB5 (symbolic "BM": "BM".AXIS[x] (x is the drive axis number).