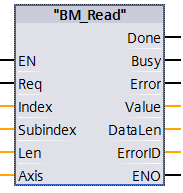
BM_Read
Description
The function FC BM_READ can be used to read a parameter by demand data communication of a bmaXX controller
|
Parameter Input |
Data Type |
Description |
|
Req |
BOOL |
TRUE= Start to read parameter FALSE= End to read a parameter |
|
Index |
INT |
Parameter Index |
|
Subindes |
BYTE |
Parameter Subindex |
|
Len |
BYTE |
Parameter Type value |
|
Parameter Output |
Data Type |
Description |
|
Done |
BOOL |
Reading done without errors |
|
Busy |
BOOL |
Read status is still active |
|
Errror |
BOOL |
Parameter read error; ErrorID is valid |
|
Value |
DWORD |
Parameter value |
|
DataLen |
BYTE |
Total data length |
|
ErrorID |
DWORD |
Communication ErrorID Siemens error list |
|
Parameter Input and output |
Data Type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
Notes:
A command from "BM_Read" must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with "BM_Reset". Function block command will be executed successfully at "BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Req
TRUE at parameter input REQ starts the communication.
Input Index
The parameter index number to be read.
Input Subindex
The parameter sub-index number to be read.
LEN
The value of the parameter data type to be read
|
LEN |
Data Type |
Description of byte length |
|
0x0001 |
BOOL |
1 |
|
0x0002 |
SINT |
1 |
|
0x0003 |
INT |
2 |
|
0x0004 |
DINT |
4 |
|
0x0005 |
USINT |
1 |
|
0x0006 |
UINT or WORD |
2 |
|
0x0007 |
UDINT or DWORD |
4 |
|
0x0008 |
FLOAT |
4 |
Output Done:
TRUE: Reading the parameter without errors if finished
FALSE: Not active
Output Busy:
TRUE: Reading status still active.
FALSE: Not active.
Output Error:
TRUE: There is an error at the service data communication for the parameter Read. Information at ErrorID is valid and error information refer to S7 Description
FALSE: No error active.
Output Value:
Parameter value to be read
Output Len:
Total data length of service data communication
Output ErrorID:
The information of Service Communication error (for details refer to S7 Description)
Input and output Axis:
UDT type symbolic BM Motion Control axis variable.
During the programming with the template data module DB5 (symbolic "BM") the following symbol text must be used: "BM".AXIS[x] (x is the drive axis number).