BM_STOP
Description
The following drive states are stopped by the Motion Control FC
BM_Stop:
Homing, Discrete Motion, Continuous Motion and Synchronized Motion.
Attention:
Movement commands of synchronized motion in the status Stopping is not possible.
|
Parameter Input |
Data Type |
Description |
|
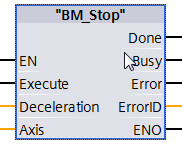
Execute |
BOOL |
Increasing edge starts the Stopping |
|
Deceleration |
REAL |
Maximum delay to stop the axis; Default [Inc/ms²] |
|
Parameter Output |
Data Type |
Description |
|
Done |
BOOL |
Stop is executed Done = TRUE as long as Execute = TRUE. |
|
Busy |
BOOL |
Parameter read/write active |
|
Error |
BOOL |
Parameter read/write error |
|
ErrorID |
WORD |
Communication ErrorID-Siemens error list |
|
Parameter Input and output |
Data Type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
Description
The following drive states are stopped by the BM_Stop command:
Homing, DiscreteMotion, ContinuousMotion and SynchronizedMotion.
The axis is switched into the stopping status in order to stop it. As soon as the axis was
stopped and the input Execute=FALSE, the axis is switched into the standstill status.
Edge-sensitive execution:
The input Execute must be set from 0 to 1 in order to execute the command. Then
the command is executed and the result Done signals Execute = TRUE at the
input.
Status message via BM_ReadStatus:
From status: Standstill, Homing, DiscreteMotion, ContinuousMotion, SynchronizedMotion.
To status: Stopping Standstill.
Note:
Stopping to a defined position is not possible.
A command from "BM_Stop" must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with "BM_Reset". Function block command will be executed successfully at
"BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Execute:
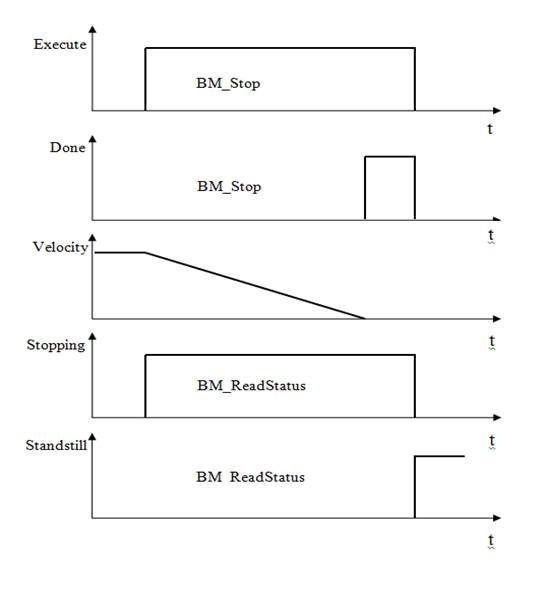
The rising edge (FALSE -> TRUE) initiates the command BM_Stop. The axis is switched into the drive status Stopping and is stopped.
The axis remains in the drive state Stopping until the axis is stopped at the input Execute = TRUE. After this the input Execute = FALSE and the axis change into the drive state from stopping to standstill.
See example 1
Input Deceleration:
Drive delay, resolution: Inc/ms².
BM_Velocity: (speed control)
Standard speed =3276 [Inc/ms] accordant to maximum speed
Braking time = 3276 [Inc/ms] / Deceleration.
Deceleration minimum: 0.00546[Inc/ms²]
BM_MoveAbsolute / BM_MoveRelative / BM_Home:
Deceleration minimum: 0.07 Inc/ms²
Deceleration maximum: 655.35 Inc/ms²
Conversion to U/s² at Inc / ms²:
Deceleration [U/s²] =
Deceleration [Inc / ms²] * 1 [revolution] / 65536 [Inc] * 1000 000[ms²] / 1 s²
Output Done:
Done = TRUE: Stop is executed at the input Execute = TRUE.
Output Busy:
TRUE: The service communication for the parameter Read/Write is active.
FALSE: Not active.
Output Error:
TRUE: An error at the service communication for the parameter Read/Write is available. See Error Info. Refer to S7 Description.
FALSE: No error active.
Output ErrorID:
The information of service communication error (for detailed information refer to S7 Description)
Input and output Axis:
UDT type symbolic BM Motion Control axis variable.
During the programming with the template data module DB5 (symbolic "BM" must be written with the following symbol text: "BM".AXIS[x] (x is drive axis number).
Example 1: Axis is stopped with BM_Stop – and the input Execute remains TRUE