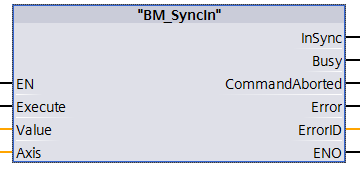
BM_SyncIn
Description
BM_SyncIn for Motion Control Synchronous axis OB61 is used to execute a relative positioning coupling of a drive to a synchronism set value. The function module switches the defined drive at the axis input in the "Synchronized" status.
|
Parameter Input |
Data Type |
Description |
|
Execute |
BOOL |
Execute coupling |
|
Value |
DWORD |
Synchronism set value resolution 32 bit (angle), [Inc] |
|
Parameter Output |
Data Type |
Description |
|
InSync |
BOOL |
Synchronism active |
|
Busy |
BOOL |
Parameter Read / Write status is still active |
|
CommandAborted |
BOOL |
Abort by another Motion Control command or Errorstop |
|
Error |
BOOL |
Write error; ErrorID is valid |
|
ErrorID |
DWORD |
Communication ErrorID Siemens error list |
|
Parameter Input and output |
Data Type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
This function for Motion Control is used to execute a relative positioning coupling of a drive to a synchronism set value. The positioning coupling of the drive is made relatively to the turn-on time and not absolutely! The drive is switched in the "Synchronized" status (synchronous synchronism). The value at the input Value is used as the synchronism set value.
Status control via MC_ReadStatus:
From status: Standstill, ContinuousMotion, DiscreteMotion.
To status: Synchronized.
Recommended task: Can be used only in a synchronized set value task, OB61.
Edge-sensitive execution:
To execute the command the input Execute can be one cycle TRUE. Then the command is executed and the result InSync is signaled. If Execute=FALSE remains then the coupling remains and further on InSync is signaled until the command is aborted by BM_SyncOut or BM_Stop at the parameter input value of BM_SyncIn at speed = 0.
Note:
A command from "BM_SyncIn" must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with “BM_Reset”. Function block command will be executed successfully at
"BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Execute:
At the input Execute the function module is enabled edge-sensitive.
Input Value:
Synchronism set value with 32 bit angle resolution per revolution. The axis is
moved within the same ratio as this synchronism set value changes. This input
is active as soon
as the output InSync = TRUE.
Output InSync:
The relative angle synchronism is accepted by the output InSync = TRUE. The
coupling continuously remains until the command is aborted
BM_SyncOut or
BM_Stop command at the parameter input Value of BM_SyncIn at a speed = 0.
Output CommandAborted:
The Motion Control command BM_SyncIn is aborted if CommandAborted = TRUE. An
interruption is possible e.g. with BM_Stop, missing availability at BM_Power or
by a drive error.
Output Error:
TRUE: There is an error at service data communication for the parameter. Read Information at ErrorID valid and Error information refer to S7 Description.
FALSE: No error active.
Output ErrorID:
The information of service communication errors (for detailed information refer to S7 Description).
Input and output Axis:
UDT type symbolic BM Motion Control Axis Variable.
During the programming with the template data module DB5 (symbolic "BM") the following symbol text must be written: "BM".AXIS[x] (x is drive axis number).