MotionControl Achse Adressierung über Datenbaustein BM
Axis Referenz Daten CPU1500_BM_AXIS_REF aus Bibliothek BM_PROFINET_TIA_14bd10 ins PLC-Datentypen einfügen und Datenbaustein BM ins Programmbausteine einfügen.
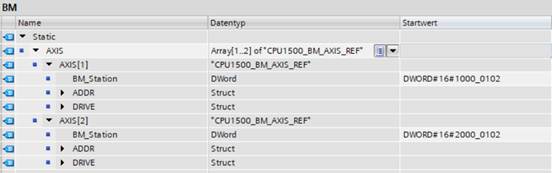
Doppelklicken Datenbaustein BM und tragen notwendige Achse Bereich, Parameter HW-Adresse und erst Parameter HW-Kennung auf.
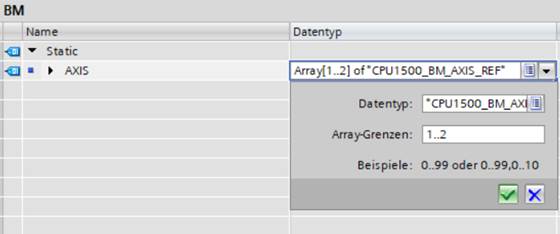
· Im dem „Axis“ mit Datentyp [ ARRAY[x..y] of CPU1500_BM_AXIS_REF werde Motion Control Achse Bereich unter dem „Array-Grenzen“ eingetragen.
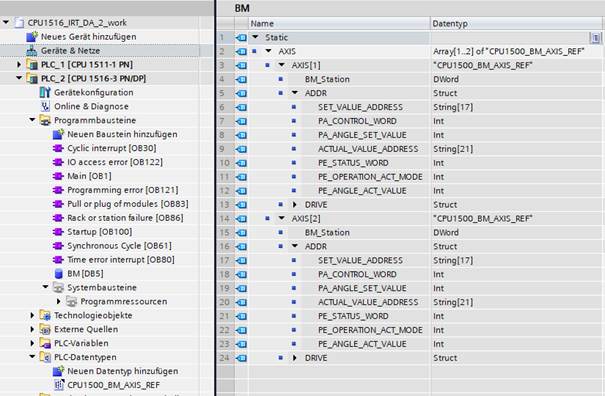
Abbildung 1: Slave Achse Einstellung
· Unter Motion Control Achse Nummer AXIS[] à BM_Station werde erst Sollwert Parameter Hardware-Kennung(HW-Kennung) des bmaXX-Gerätes eingetragen.
BM_Station Parametrierung:
Die „BM_Station“ definiert Regler Achse Nummer und Profinet Slave Kennung, die Type von“ BM_Station“ beträgt ein DWORD (DW#16#HW_LW), (HW: high word , LW: low word)
HW ist Achsnummer des bmaXX-Geräts:
Doppelachse Gerät:
Achse1: HW= 0x1000
Achse2: HW= 0x2000
Einzel Achse bmaXX Gerät:
Achse1: HW= 0x1000
LW ist Hardware Kennung(HW-Kennung) von Parameter der ersten Peripherie A-Adresse, der Parameter HW-Kennung unter EigenschaftenàSystemkonstanten zu finden. Und die Wert muss auf Hexadezimal umgerechnet werden.
![]()
![]()
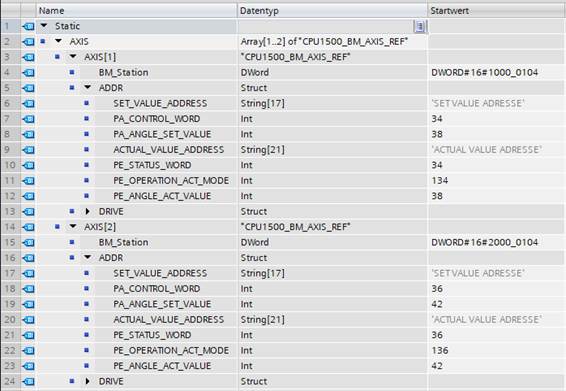
Abbildung 2: Hardware-Konfiguration von CPU1500(1. Sollwert Parameter mit HW-Kennung von 260) mit einem bmaXX Doppelachse Gerät
· Parameter Soll-/Istwert Adresse Erstellung:
Motion Control RT-Anwendung Adressierung
Sollwert Parameter:
Parameter 108.1: Steuerwort (PA_CONTROL_WORD)
Istwert Parameter:
Parameter 108.3: Statuswort (PE_STATUS_WORD)
Parameter 109.2: aktuell Betriebsart (PE_OPERATION_ACT_MODE)
Motion Control IRT-Anwendung mit Lage Regelung Adressierung
Sollwert Parameter:
Parameter 108.1: Steuerwort (PA_CONTROL_WORD)
Parameter 108.5: Ziel-Winkelsollert (PA_ANGLE_SET_VALUE)
Istwert Parameter:
Parameter 108.3: Statuswort (PE_STATUS_WORD)
Parameter 109.2: aktuell Betriebsart (PE_OPERATION_ACT_MODE)
Parameter 18.55: Lage-Istwert (PE_ANGLE_ACT_VALUE)
Beispiel A:
Motion Control Parameter Adressierung mit CPU1500 RT-Prozessdaten Kommunikation bei einer Doppelachse Geräte
Schritt 1:
Parameter in Reihfolge als Sollwerte aus Hardware-Katalog von Baumüller Modul Doppelachse einfügen, siehe Abbildung 3.
Steckplatz Nr.1 : Param 108.1 : Steuerwort1_1 für Achse 1
Steckplatz Nr.2 : Param 108.1 : Steuerwort1_2 für Achse 2
Parameter in Reihfolge als Istwerte aus Hardware-Katalog von Baumüller Modul Doppelachse einfügen
Steckplatz Nr.17 : Param 108.3 : Statuswort1_1 für Achse 1
Steckplatz Nr.18 : Param 108.3 : Statuswort1_2 für Achse 2
Steckplatz Nr.19 : Param 109.2 : Ist-Betriebsart_1 für Achse 1
Steckplatz Nr.20 : Param 109.2 : Ist-Betriebsart_2 für Achse 2
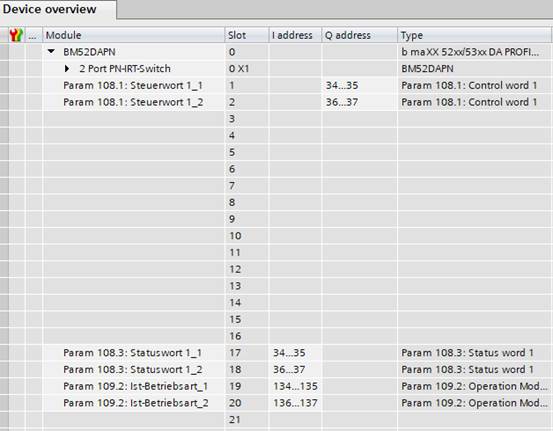
Abbildung 3: bmaXX Geräte Doppelachse RT Parameter Adressierung von CPU1500
Schritt2:
Alle Parameter von Doppelachse Nummer 1 müssen Einstellung unter Eigenschaften àAllgemein àBaugruppenparameter, siehe Abbildung 4
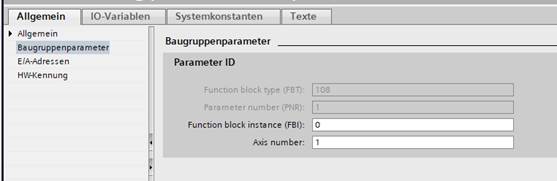
Abbildung 4 Doppelachse Geräte Achse Nummer 1 Einstellung
Schritt 3:
Alle Parameter von Doppelachse Nummer 2 müssen Einstellung unter Eigenschaften àAllgemein àBaugruppenparameter, siehe Abbildung 5
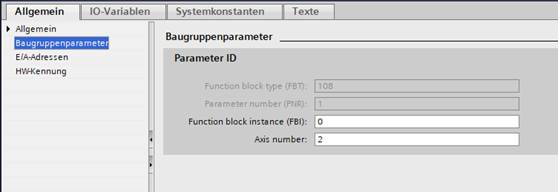
Abbildung 5 Doppelachse Geräte Achse Nummer 2 Einstellung
Schritt 4:
Bei einer Einstellung von Prozessdaten Austausch in der RT Bus System muss alle Parameter von Prozessabbild unter Eigenschaften à Allgemein à E/A-Adressen: Taktsynchroner Betrieb deaktivieren, Organisationsbaustein mit OB1 und Prozessabbild mit TPA1 oder Automatische Aktualiesierung einsellen.
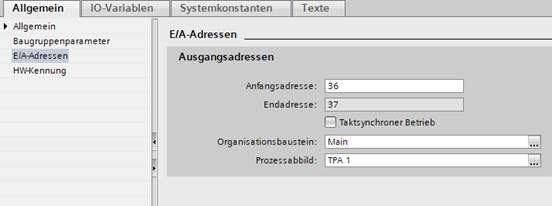
Abbildung 6 Prozessabbild von RT Bus System
Schritt 5:
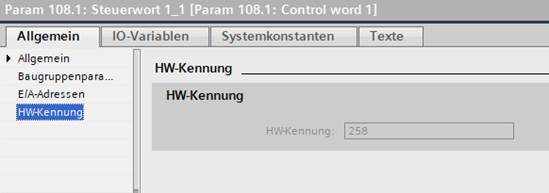
Baumüller bmaXX Gerät definiert HW-Kennung von 1. Parameter Sollwert bzw. 1. Parameter Peripherie A-Adresse als Baumüller Station Hardware Kennung für Azyklische Daten Kommunikation. Die HW-Kennung ist unter Eigenschaften à 1. Parameter Sollwert à Allgemein à HW-Kennung oder unter Eigenschaften àSystemkonstanten à 1. Parameter Sollwert à HW-Kennung zu finden
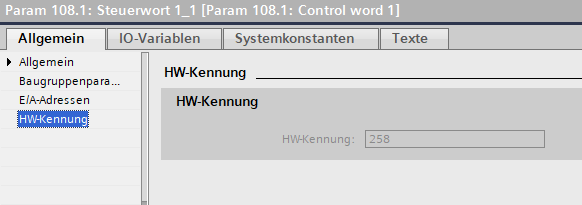
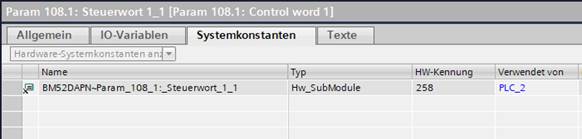
Abbildung 7 Parameter HW-Kennung
Beispiel B:
Motion Control Parameter Adressierung mit CPU1500 IRT-Prozessdaten Kommunikation bei einer Doppelachse Geräte
Schritt 1:
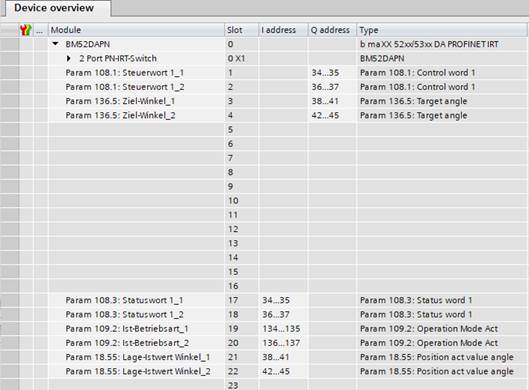
Parameter in Reihfolge als Sollwerte aus Hardware-Katalog von Baumüller Modul Doppelachse einfügen, siehe Abbildung 8.
Steckplatz Nr.1 : Param 108.1 : Steuerwort1_1 für Achse 1
Steckplatz Nr.2 : Param 108.1 : Steuerwort1_2 für Achse 2
Steckplatz Nr.3 : Param 108.5 : Ziel-Winkel_1 für Achse 1
Steckplatz Nr.4 : Param 108.5 : Ziel-Winkel_2 für Achse 2
Parameter in Reihfolge als Istwerte aus Hardware-Katalog von Baumüller Modul Doppelachse einfügen
Steckplatz Nr.17 : Param 108.3 : Statuswort1_1 für Achse 1
Steckplatz Nr.18 : Param 108.3 : Statuswort1_2 für Achse 2
Steckplatz Nr.19 : Param 109.2 : Ist-Betriebsart_1 für Achse 1
Steckplatz Nr.20 : Param 109.2 : Ist-Betriebsart_2 für Achse 2
Steckplatz Nr.21: Param 18.55 : Lage-Istwert Winkel_1 für Achse 1
Steckplatz Nr.22: Param 18.55 : Lage-Istwert Winkel_2 für Achse 2
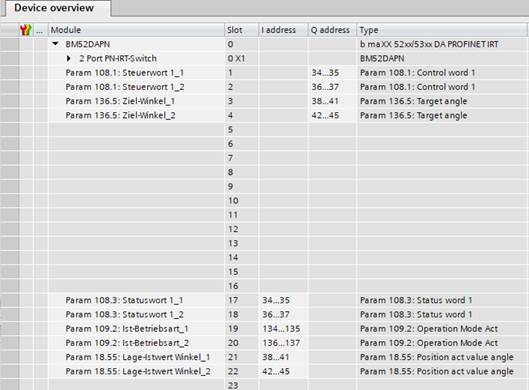
Abbildung 8: bmaXX Geräte Doppelachse IRT Parameter Adressierung von CPU1500
Schritt2:
Alle Parameter von Doppelachse Nummer 1 müssen Einstellung unter Eigenschaften àAllgemein àBaugruppenparameter, siehe Abbildung 4
Schritt 3:
Alle Parameter von Doppelachse Nummer 2 müssen Einstellung unter Eigenschaften àAllgemein àBaugruppenparameter, siehe Abbildung 5
Schritt 4:
Bei einer Einstellung von Prozessdaten Austausch in der RT Bus System muss alle Parameter von Prozessabbild unter Eigenschaften à Allgemein à E/A-Adressen: Taktsynchroner Betrieb aktivieren, Organisationsbaustein mit OB61(Synchronous Cycle) und Prozessabbild mit TPA1 einsellen. Prozessabbild der Eingänge synchronisieren SYNC_PI und Prozessabbild der Ausgänge synchronisieren SYNC_PO müssen im OB61 einprogrammiert werden, ohne die Programmierung werden kein zyklischen Daten ausgetauscht, die beiden Prozessabbild finden erweiterte Anweisungen bei Anweisungen
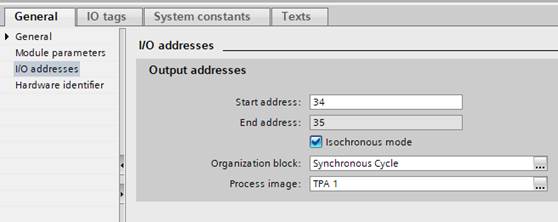
Abbildung 8 Prozessabbild von IRT Bus System
Schritt 5:
Baumüller bmaXX Gerät definiert HW-Kennung von 1. Parameter Sollwert bzw. 1. Parameter Peripherie A-Adresse als Baumüller Station Hardware Kennung für Azyklische Daten Kommunikation. Die HW-Kennung ist unter Eigenschaften à 1. Parameter Sollwert à Allgemein à HW-Kennung oder unter Eingenschaften àSystemkonstanten à 1. Parameter Sollwert à HW-Kennung zu finden, siehe Abbildung 7
Beispiel C:
Motion Control Achse Parametrierung Bezug unter Siemens Tia Portal Baumüller Geräte Konfiguration mit CPU1500.
Schritt 1:
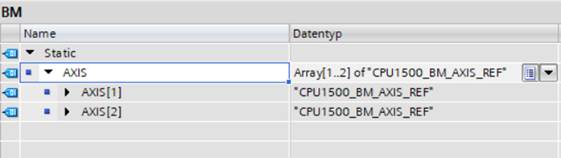
Öffnen Datenbaustein BM und stellen Zahl 1..2 bei Array-Grenzen für Motion Control Achse Nummer 1 und 2.
Schritt 2:
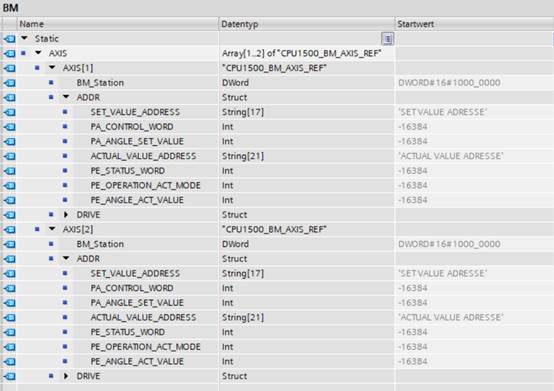
Aktivieren ADDR Parameter Bereich unter Axis[1] und Axis[2]
Schritt 3:
Doppelachse Nummer 1 stellt als Motion Control Achse 1 und Doppelachse Nummer 2 stellt als Motion Control Achse 2 und Unter Geräte&Netze à Geräteübersicht öffnen eingestellte bmaXX Geräte Parameter Fenster
Schritt 4:
Hardware-Kennung des bmaXX Gerätes lese aus 1. Sollwert bzw. Param 108.1 Steuerwort1_1 unter Eigenschaften à allgemein à HW-Kennung ein
HW-Kennung = 258 / 0x102
Schritt 5:
Sortieren alle eingestellte Parameter und Anfangsadresse für Motion Control Achse Nummer 1 und Achse 2 ein.
Alle Paramter für Motion Control Ache Nummer 1
Sollwert
Param 108.1: Steuerwort1_1 und Anfangsadresse: 34
Param 108.5: Ziel-Winkel_1 und Anfangsadresse: 38
Istwert
Param 108.3 : Statuswort1_1 und Anfangsadresse: 34
Param 109.2 : Ist-Betriebsart_1 und Anfangsadresse: 134
Param 18.55 : Lage-Istwert Winkel_1 und Anfangsadresse 38
Alle Parameter für Motion Control Achse Nummer 2
Sollwert
Param 108.1: Steuerwort1_2 und Anfangsadresse: 36
Param 108.5: Ziel-Winkel_2 und Anfangsadresse: 42
Istwert
Param 108.3 : Statuswort1_2 und Anfangsadresse: 34
Param 109.2 : Ist-Betriebsart_2 und Anfangsadresse: 136
Param 18.55 : Lage-Istwert Winkel_2 und Anfangsadresse 42
Schritt 6:
Hardware Kennung an BM_Station für Motion Control Achse Nummer 1 und 2 eintragen
Axis [1]: BM_Station = 0x1000_0102
Axis [2]: BM_Station = 0x2000_0102
![]()
![]()
![]()
![]()
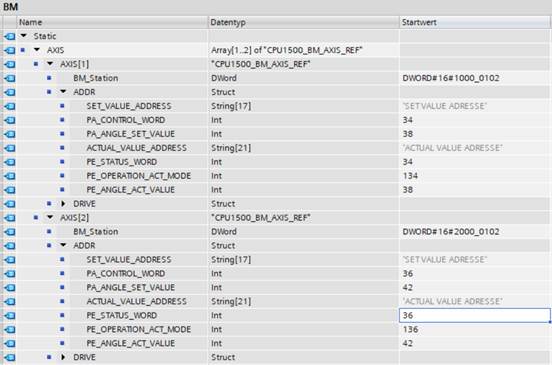
Schritt 7:
Parameter Adresse auf Datenbaustein BM eintragen
Bei AXIS[1]:
Sollwert Adresse:
PA_CONTROL_WORD = 34
PA_ANGLE_SET_VALUE = 38
Istwert Adresse:
PE_STATUS_WORD = 34
PE_OPERATION_ACT_MODE = 134
PE_ANGE_ACT_VALUE = 38
Bei AXIS[2]:
Sollwert Adresse:
PA_CONTROL_WORD = 36
PA_ANGLE_SET_VALUE = 42
Istwert Adresse:
PE_STATUS_WORD = 36
PE_OPERATION_ACT_MODE = 136
PE_ANGE_ACT_VALUE = 42