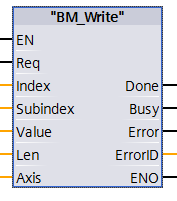
BM_Write
Description
The function FC BM_WRITE can be used to write a parameter by service data communication to the bmaXX controller.
|
Parameter Input |
Data Type |
Description |
|
Req |
BOOL |
TRUE= Beginning to write a parameter FALSE= Finish to write a parameter |
|
Index |
INT |
Parameter Index |
|
Subindex |
BYTE |
Parameter Subindex |
|
Value |
DWORD |
Value of a parameter |
|
LEN |
BYTE |
Parameter type value |
|
Parameter Ausgang |
Data Type |
Description |
|
Done |
BOOL |
Writing done without errors |
|
Busy |
BOOL |
Writing status is still active |
|
Error |
BOOL |
Writing error; ErrorID is valid |
|
ErrorID |
DWORD |
Communication ErrorID Siemens error list |
|
Parameter Input and output |
Data Type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
Notes:
A command from "BM_Write” must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with “BM_Reset”. Function block command will be executed successfully at
"BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Req
TRUE at parameter input REQ starts the communication.
FALSE: not active
Input Index
The parameter index number to be read.
Input Subindex
The parameter subindex number to be read.
Input LEN
The value of the parameter data type to be read
|
LEN |
Data Type |
Description of byte length |
|
0x0001 |
BOOL |
1 |
|
0x0002 |
SINT |
1 |
|
0x0003 |
INT |
2 |
|
0x0004 |
DINT |
4 |
|
0x0005 |
USINT |
1 |
|
0x0006 |
UINT or WORD |
2 |
|
0x0007 |
UDINT or DWORD |
4 |
|
0x0008 |
FLOAT |
4 |
Output Done:
TRUE: Reading the parameter without errors if finished
FALSE: Not active
Output Busy:
TRUE: Reading status still active.
FALSE: Not active.
Output Error:
TRUE: There is an error at the service data communication for the parameter Read Information at ErrorID is valid and error information refer to S7 Description.
FALSE: No error active.
Output Value:
Parameter value to be read.
Output Len:
Total data length of service data communication.
Output ErrorID:
The information of Service Communication error (for details refer to S7 Description)
Input and output Axis:
UDT type symbolic BM Motion Control axis variable.
During the programming with the template data module DB5 (symbolic “BM”) the following symbol text must be used: "BM".AXIS[x] (x is the drive axis number).