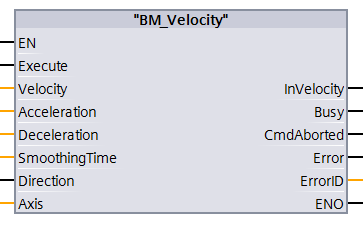
BM_Velocity
Description
The BM Motion Control BM_MoveVelocity command implements an endless movement by a specified speed.
|
Parameter Input |
Data Type |
Description |
|
Execute |
BOOL |
Edge-sensitive execution |
|
Velocity |
REAL |
Absolute value of the target speed with signs [Inc/ms] |
|
Acceleration |
REAL |
Absolute value of acceleration within the target positioning [Inc/ms²] |
|
Deceleration |
REAL |
Absolute value of deceleration within the target positioning [Inc/ms²] |
|
SmoothingTime |
INT |
Smoothing time, [ms] |
|
Direction |
BOOL |
Moving direction |
|
Parameter Output |
Data Type |
Description |
|
InVelocity |
BOOL |
Target speed reached |
|
Busy |
BOOL |
Parameter Read/Write active |
|
CommandAborted |
BOOL |
Abort by another Motion Control command, BM_Stop or Errorstop |
|
Error |
BOOL |
Parameter Read/Write error; ErrorID is valid |
|
ErrorID |
DWORD |
Communication ErrorID Siemens error list |
|
Parameter Input and output |
Data Type |
Description |
|
Axis |
UDT |
BM Motion Control axis variable |
Description
The BM_MoveVelocity command carries out a speed default. The command switches the axis in the ContinuousMotion state and closes with InVelocity = TRUE and remains in the ContinuousMotion state as long as no other Movement command is switched. An edge-sensitive execution is made with Execute = TRUE whereby the input values are taken over and the command is implemented at the defined drive at the Axis. An entering of the command once again requires a change from FALSE to TRUE at the input Execute, whereby this change can be carried out during the execution time of the command.
Movement command:
The edge-sensitive execution causes an abort of the active movement command. The execution is interrupted by BM_Stop, the missing availability or by Errorstop. At the result message one of the output bits only is active – InVelocity, CommandAborted, Busy or Error.
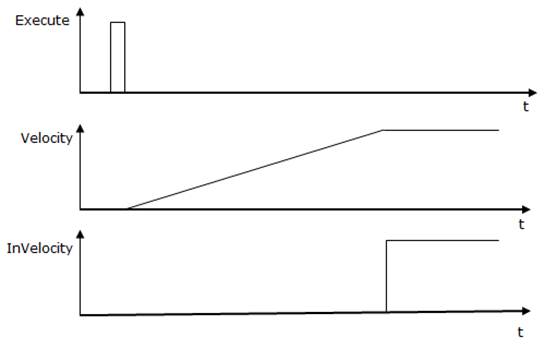
Edge-sensitive execution:
To carry out the command the input Execute must be TRUE for one cycle only. Then the command is carried out and the result InVelocity signals if the target speed was reached.
State
control via BM_ReadStatus:
From status: Standstill, DiscreteMotion, ContinuousMotion,
SynchronizedMotion.
To status: ContinuousMotion.
Recommended task: OB1.
Note:
An active command "BM_Velocity" can be interrupted by a positioning command
after DiscreteMotion. The positioning is carried out from the current actual
position of the drive. Optionally, stopping can be carried out by BM_Stop and
Homing via BM_Home after this.
A command from "BM_Velocity" must not be activated before a command from another function block has been not successfully executed.
If an error occurs during the command execution, the error must be reset with "BM_Reset". Function block command will be executed successfully at
"BM" .AXIS [x] .DRIVE.BM_AXIS_STATUS.ParmRW_Active = 0.
Input Execute:
TRUE: Edge-sensitive execution, the input parameters are accepted.
FALSE: No execution.
Input Velocity:
Specification in increments per milliseconds. This is the target speed by which the output InVelocity = TRUE is reached.
Speed examples
|
U/min |
Inc/ms |
|
3000 |
3276 |
|
2000 |
2184 |
|
1000 |
1092 |
Input Acceleration:
Positive acceleration as an absolute value in increments per milliseconds2, converted in the bmaXX controller as milliseconds for the accordant maximum drive speed.
Acceleration time = 3276 [Inc/ms] / Acceleration.
Acceleration minimum: 0.00546[Inc/ms²]
Input Deceleration:
Negative acceleration in increments per milliseconds2, converted in the b maXX controller as milliseconds for the accordant drive speed.
Deceleration time = 3276 [Inc/ms] / Deceleration.
Deceleration minimal: 0.00546[Inc/ms²]
Input SmoothingTime:
Smoothing time for the acceleration, deceleration. Absolute value in milliseconds.
Input Direction:
Specification of moving direction with BOOL.
FALSE: Positive moving direction.
TRUE: Negative moving direction.
Output InVelocity:
TRUE:
Target speed reached. Axis remains in the ContinuousMotion state.
FALSE: Not active.
Output Busy:
TRUE: the
service communication for the parameter Read/Write is active
FALSE: Not active.
Output CommandAborted:
TRUE:
Abort by another Motion Control command, BM_Stop command, Errorstop or missing
availability at the BM_Power.
FALSE: Not active.
Output Error:
TRUE: An error at service communication for parameter Read/Write is existent
for Information on the valid ErrorID and Error information refer to S7 Description.
FALSE: No error active.
Output ErrorID:
The information of Service Communication error (for details refer to S7 Description)
Input and output Axis:
UDT type symbolic BM Motion Control axis variable.
During the programming with the template data module DB5 (symbolic "BM") the following symbol text must be used: "BM".AXIS[x] (x is the drive axis number).