


General description
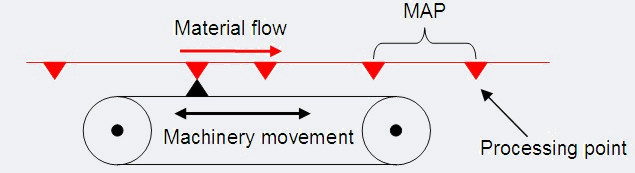
This component is suitable for operating linear axes that are to move in sync with a master position. This type of movement can always be used when continuously moved products are to be processed. The machinery can be a spindle or a toothed belt, for example. Two characteristic parameters are required: the SEP and the MAP.
The SEP is a digital event that indicates the end of processing. From this point, the axis moves to the next synchronization point. The MAP is the distance to the next synchronization position of the master.
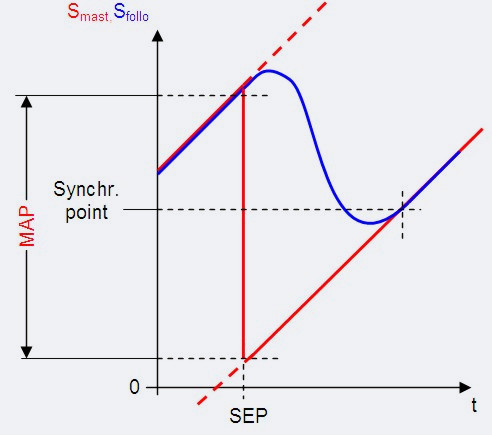
The movement process is always divided into four phases: sync-up, synchronized traversal, sync-down and return travel. A cycle always begins at the SEP here, i.e. at the end of the synchronized traversal (except with the start cycle). The movement for the following cycle is determined at this point. The MAP must be known at the end of the synchronized traversal for this reason.
The following figure shows the path of the axis and master over time. The axis moves in sync with the master. The axis ends synchronous movement with the SEP signal and reverses in such a way that it is offset exactly by the MAP distance and is synchronized again.
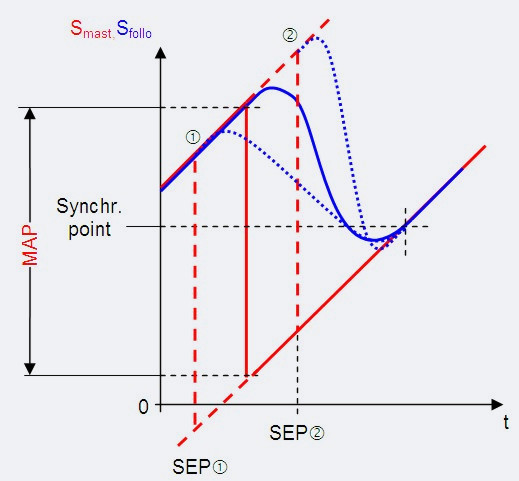
Regardless of the time when the SEP is detected (see figure below; situation (1) or (2)), the axis (with the same MAP) meets the next product at the specified position.
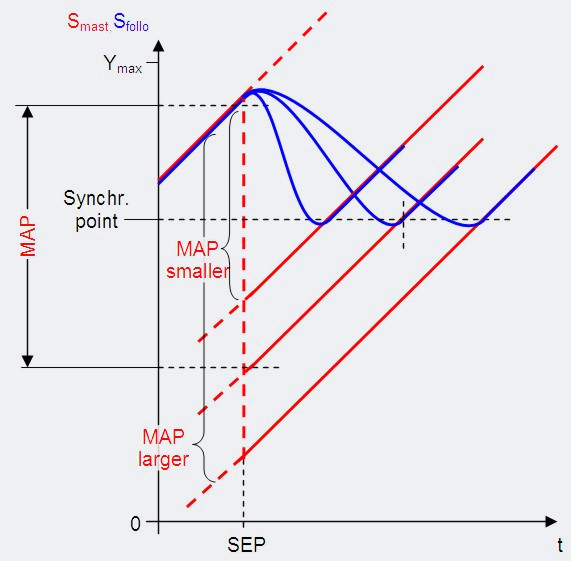
If the MAP is changed, the following movement sequence results:
Attention:
The TB_SyncLin function module can only be used in a synchronized setpoint event task.