


Funktionalität
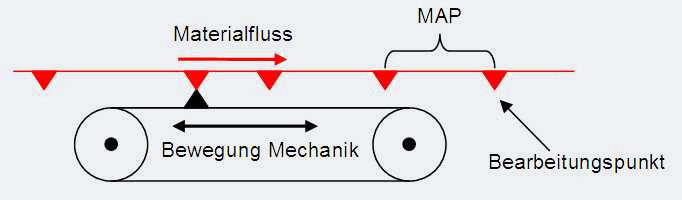
Der Baustein eignet sich für die Ansteuerung von linearen Achsen, die sich synchron zu einer Masterposition bewegen sollen. Diese Bewegungsart kann immer dann verwendet werden, wenn kontinuierlich bewegte Produkte bearbeitet werden sollen. Die Mechanik kann z.B. eine Spindel oder ein Zahnriemen sein. Es werden zwei charakteristische Parameter benötigt; der SEP und die MAP.
Der SEP ist ein digitales Ereignis und zeigt das Ende der Bearbeitung an. Ab diesem Punkt bewegt sich die Achse auf den nächsten Synchronpunkt zu. Die MAP ist der Abstand zur nächsten Synchronposition des Masters.
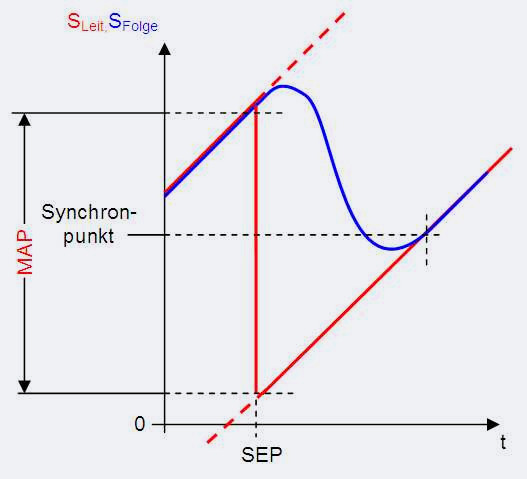
Der Bewegungsablauf teilt sich immer in die vier Phasen Aufsynchronisieren, Synchronfahrt, Absynchronisieren und Rückfahrt. Ein Zyklus beginnt hierbei immer am SEP, also am Ende der Synchronfahrt (Ausnahme ist der Starttakt). An diesem Punkt wird die Bewegung für den folgenden Takt bestimmt. Deshalb muss am Ende der Synchronfahrt die MAP bekannt sein.
Im folgenden Bild ist der Weg der Achse und des Masters über der Zeit aufgetragen. Die Achse bewegt sich synchron zum Master. Mit dem Signal SEP beendet die Achse die Synchronbewegung und kehrt so um, dass sie genau um den Abstand MAP versetzt wieder synchron wird.
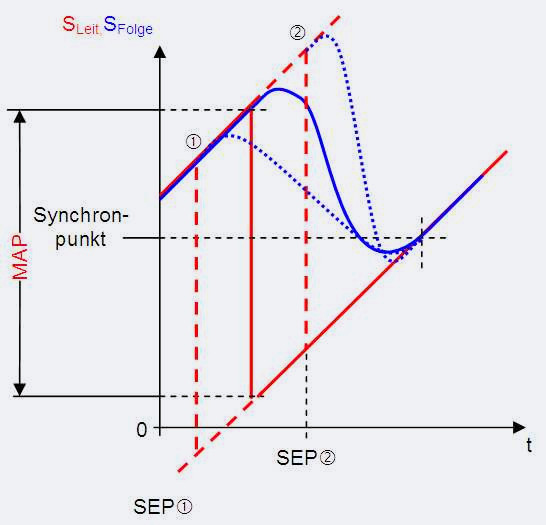
Unabhängig von dem Zeitpunkt, wann der SEP erkannt wird (siehe Bild unten, Situation (1) oder (2)), trifft die Achse (bei gleicher MAP!) das nächste Produkt an der vorgegebenen Position.
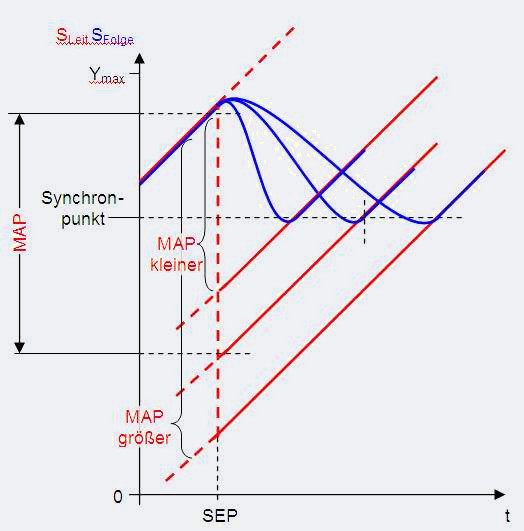
Wird die MAP verändert, ergibt sich der folgende Bewegungsablauf:
Achtung:
Der FB TB_SyncLin kann nur in einer synchronisierten Sollwert-Event Task verwendet werden.