


Beschreibung Allgemein
Beispielübersichtsbild für 2 Motoren in Master Slave Verschaltung (mit 4fach Mehrfachwicklung):

Der MotionHandler[1] ist die MasterSlave Master.
Auf die Array Nummern bezieht sich der MasterSlaveControl Baustein. In dem unten gezeigten Beispiel ist der a_MotionHandler[5] der MasterSlave Slave.
Der MultiWinding Baustein bezieht sich auch auf diese definierten Array Nummern.
| Motor | Motor 1 | Motor 2 | ||||||
| Winding | M1 W1 | M1 W2 | M1 W3 | M1 W4 | M2 W1 | M2 W2 | M2 W3 | M2 W4 |
| a_MC_Axis_Array[..] => Motion Zuweisung |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| a_MotionHandler[..] => MotionHandler Zuweisung |
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Funktion | Master Slave MASTER |
Master Slave SLAVE |
||||||
| w_MaSl_Selection | 0 (Bit 0) |
0 | 0 | 0 | 1 (Bit 4) |
0 | 0 | 0 |
Beschaltungsbeispiel der verschiedenen Bausteine:
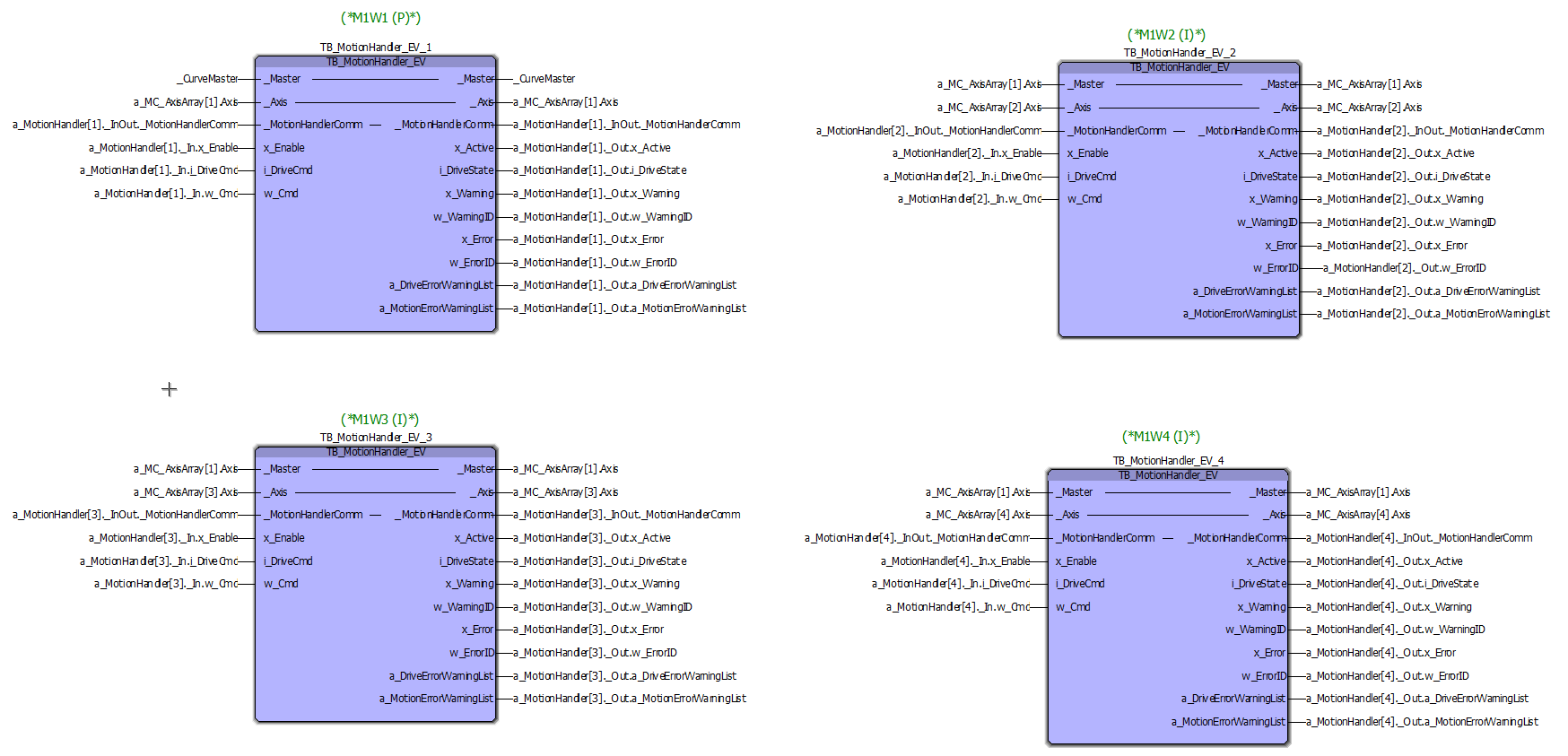
MotionHandler Motor 1 (4fach Wicklung)
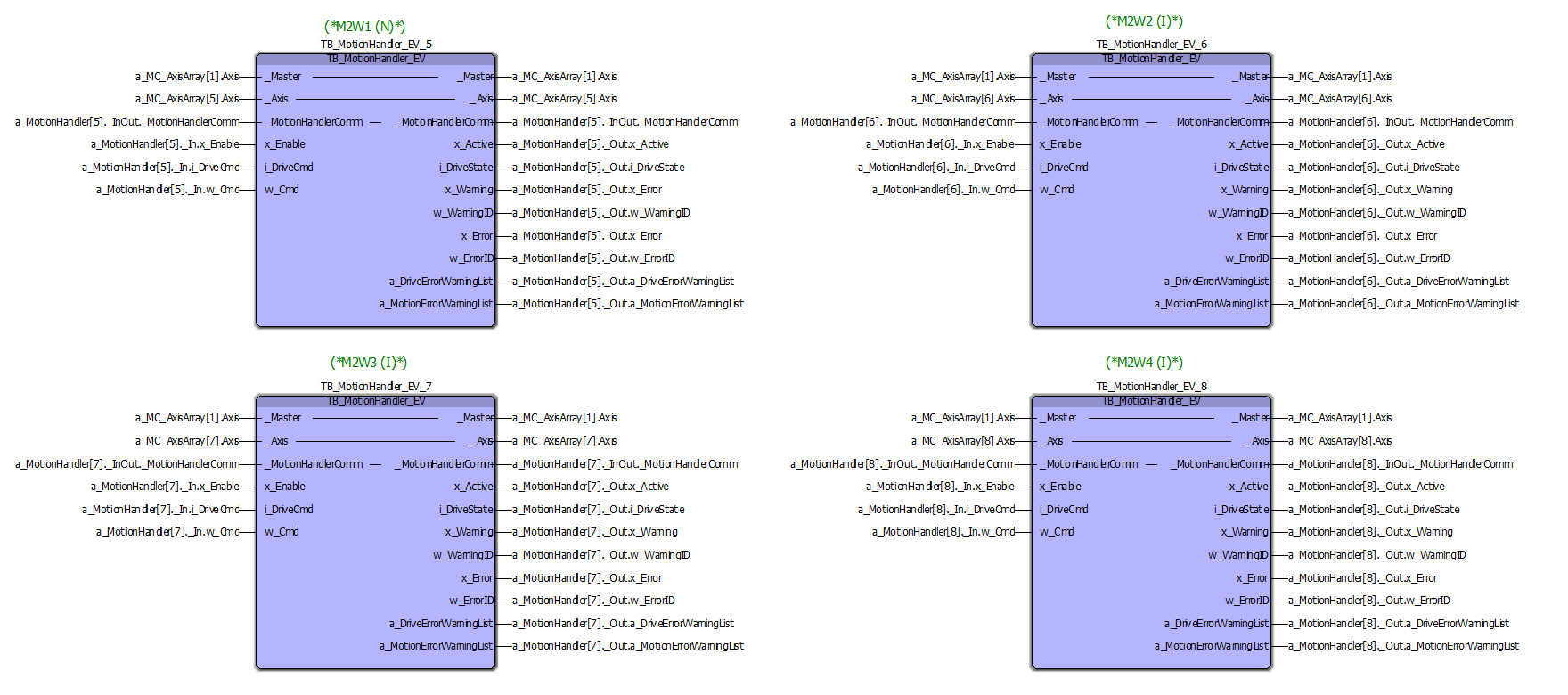
MotionHandler Motor 2 (4fach Wicklung)
=> a_MasterSlaveInit: Darüber können die TB_MasterSlaveInit Bausteine angesteuert werden. Dies geschieht intern über die Nummern. Die nach der Tabelle oben vergeben werden müssen.
=> a_MotionHandler: Über das Array wird der i_DriveState des MasterSlaveMasters ([1]) eingelesen, und abhängig davon, der/die MasterSlave Slaves angesteuert. Per Bitleiste w_MaSl_SlaveSelection wird das definiert.
Damit das alles funktioniert, müssen die Nummern wie in den Beispiel, und der o.g. Tabelle vergeben werden.

TB_MultiWindingControl:
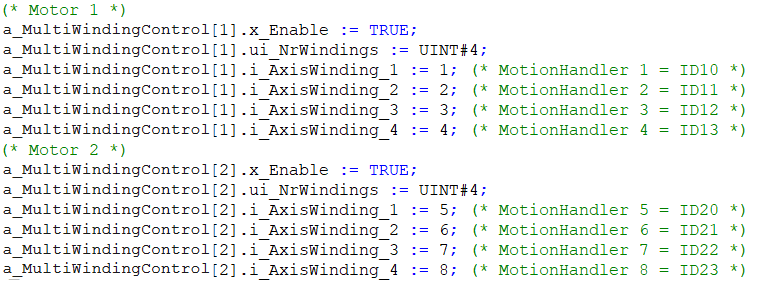
Die Nummern der Wicklungen entsprechen der der ArrrayNummern des a_MotionHandler-Arrays (s.o. Tabelle).
Über das angeschlossene a_MotionHandler Array am Baustein, können dann die MotionHandler angesteuert werden.
