Input x_Enable
TRUE: Release of the function block
FALSE: Block is not enabled, all outputs are 0, no diagnosis takes place.
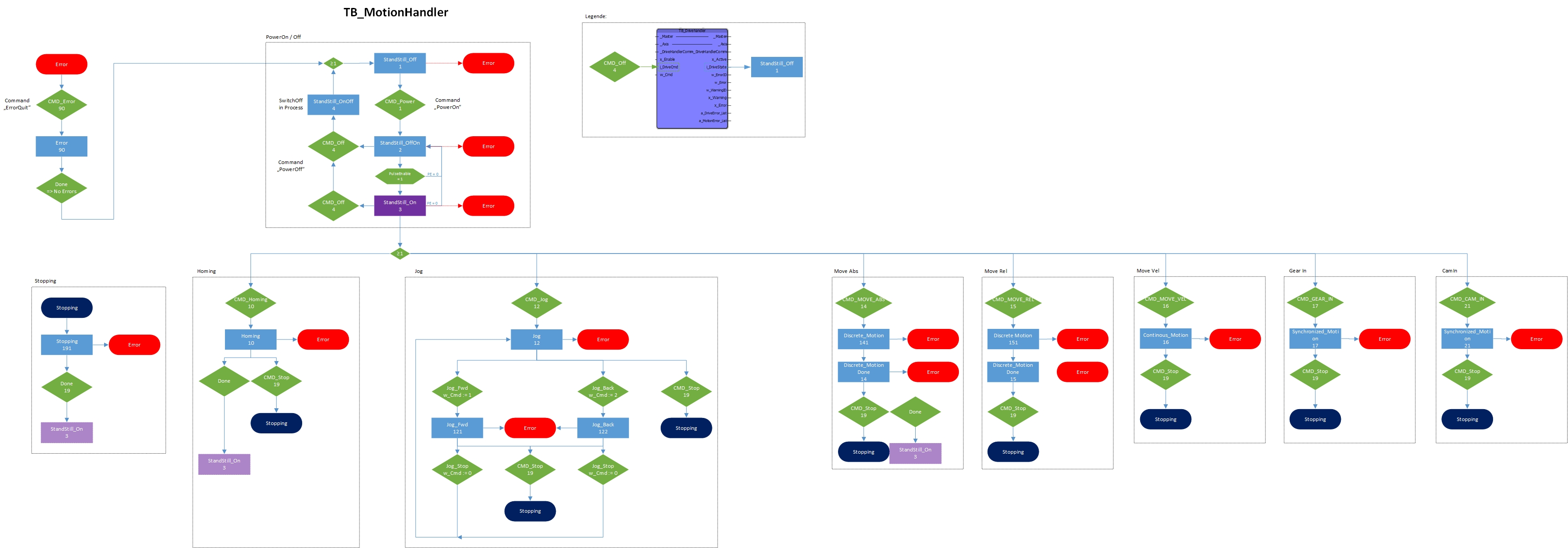
Input i_DriveCmd
With setting defined numbers, the motion states will be requested.
01 = PowerOn
04 = PowerOff
10 = Homing
12 = Jog
14 = MoveAbsolute
15 = MoveRelative
16 = MoveVelocity
17 = MC_GearIn
19 = MC_Stop
21 = CamIn
90 = ErrorQuit
The function block needs a changed number at this input, that he will take care about it.
e.g. to acknowledge an error a 2nd time you need to: 90 - 0 - 90 (Now you have done 2 times the error quit)
Just recognized when Jog by i_DriveCmd = 12 to control the direction of rotation of the drive:
Bit 0: FALSE = Jog Stop, TRUE = Jog Forward (Clockwise)
Bit 1: FALSE = Jog Stop, TRUE = Jog Backward (Counterclockwise)