Eingang x_Enable
TRUE: Freigabe des Baustein
FALSE: Baustein ist nicht freigegeben, alle Ausgänge sind 0, es findet keine Diagnose statt.
Eingang i_DriveCmd
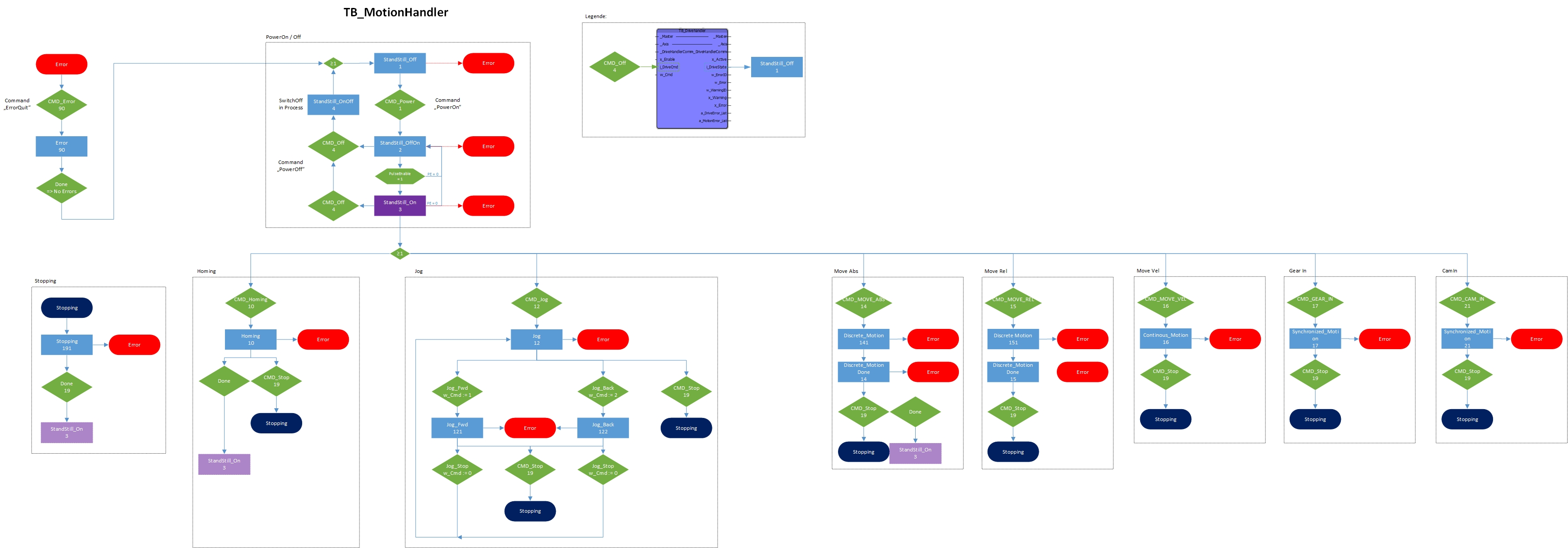
Durch Vorgabe von Nummern werden die Motionbausteine intern angesteuert:
01 = PowerOn
04 = PowerOff
10 = Homing
12 = Jog
14 = MoveAbsolute
15 = MoveRelative
16 = MoveVelocity
17 = MC_GearIn
19 = MC_Stop
21 = CamIn
90 = ErrorQuit
Damit der Baustein ein DriveCmd erkennt brauch er an diesem Eingang eine wechselnde Eingangsbeschaltung.
z.B. ein erneutes Fehlerquittieren braucht z.b. 90 - 0 - 90 (Hier wurde nun 2x ein Fehler quittiert)
Bei Vorgabe von Jog mit i_DriveCmd = 12 kann die Drehrichtung des Antriebs gesteuert werden:
Bit 0: FALSE = Jog Stop, TRUE = Jog Forward (Clockwise)
Bit 1: FALSE = Jog Stop, TRUE = Jog Backward (Counterclockwise)
Flowchart: