Ausgang x_Active
TRUE: Baustein ist frei gegeben und aktiv.
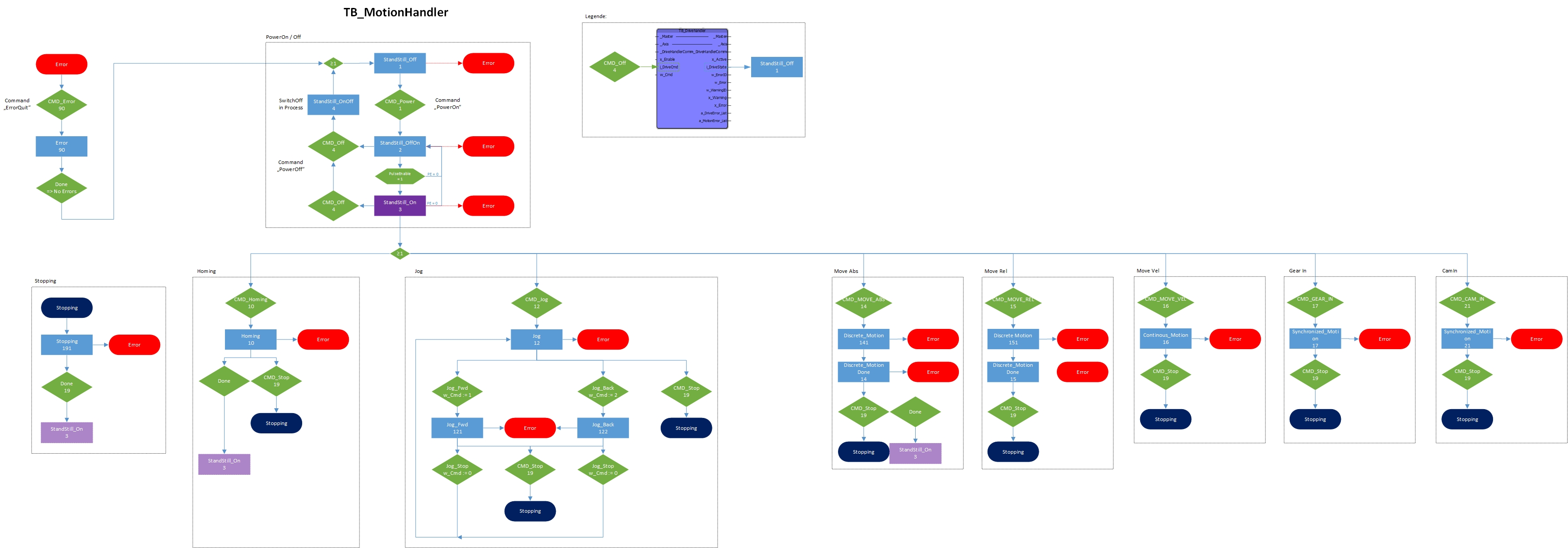
Ausgang i_DriveState
Statusmeldung über den aktuell ausgeführten MotionBaustein/State:
01 = StandStillOff
02 = StandStillOffOn
03 = StandStillOn
04 = StandStillOnOff
10 = Homing
12 = Jog
121 = Jog Fwd
122 = Jog Back
14 = MoveAbsolute (Discrete Motion)
15 = MoveRelative (Discrete Motion)
151 = MoveRelative in Bewegung
16 = MoveVelocity
17 = GearIn (Sync.Motion)
171 = GearIn einkoppeln in Arbeit
19 = Stopp
191 = Stopping
21 = CamIn (Sync. Motion)
90 = Error
Ausgang a_DriveErrorWarningList
Fehler/Warnungs Array zeigt alle Drive Fehler und Warnungen an:
[0]: Anzahl der Meldungen
[1..31]: Fehler/Warnungs Nummern in der Reihenfolge
Ausgang a_MotionErrorWarningList
Fehler/Warnungs Array zeigt alle Motion Fehler und Warnungen an:
[0]: MC_Power_ErrorID
[1]: MC_ReadStatus_ErrorID
[2]: MC_Home_ErrorID
[3]: BM_Jog_ErrorID
[4]: MC_GearIn_ErrorID
[5]: MC_Stop_ErrorID
[6]: MC_MoveVel_ErrorID
[7]: MC_MoveAbs_ErrorID
[8]: MC_MoveRel_ErrorID
[9-31]: ungenutzt im Moment
Ausgang x_Warning
TRUE: Der Baustein hat eine Warnung erkannt.
Ausgang w_WarningID
Warnungsnummer des Bausteins
Ausgang x_Error
TRUE: Der Baustein hat einen Fehler erkannt.
Ausgang w_ErrorID
1 = MC_ReadStatus Fehler
2 = Antriebsfehler
4 = Motion Control Fehler
Flowchart: