


Funktionalität
Dieser Baustein dient als Hilfsbeschaltung für den TB_TPmeasure. Er führt die 16:16 Shiftung der 32Bit Werte durch, die für den Anschluss der 32Bit Parameter an den TB_TPmeasure notwendig ist.
Folgende Parameter können abhängig vom Antrieb, als Prozessdaten gemapped werden:
Beim b maxx 4000 sind dies abhängig vom verwendeten Encoder:
| Encoder | Parameter | Objekt Nummer | Bemerkung |
|---|---|---|---|
| 1 | Geber 1 Winkel-Istwert 32 Bit | 60fb.0a | 32 Bit Winkel |
| 1 | Messwert Umdrehungen pos. Flanke 32 Bit | 0x4246 (P582) | Verwendung der unteren 16 Bit(*) |
| 1 | Messwert Winkel pos. Flanke 32 Bit | 0x4245 (P581) | Verwendung der obere 16 Bit(*) |
| 1 | Messwert Umdrehungen neg. Flanke 32 Bit | 0x4248 | Verwendung der unteren 16 Bit(*) |
| 1 | Messwert Winkel neg. Flanke 32 Bit | 0x4247 | Verwendung der obere 16 Bit(*) |
| 2 | Geber 2 Winkel-Istwert | 0x4191 | 32 Bit Winkel |
| 2 | Messwert Umdrehungen pos. Flanke 32 Bit | 0x424a | Verwendung der unteren 16 Bit(*) |
| 2 | Messwert Winkel pos. Flanke 32 Bit | 0x4249 | Verwendung der obere 16 Bit(*) |
| 2 | Messwert Umdrehungen neg. Flanke 32 Bit | 0x424c | Verwendung der unteren 16 Bit(*) |
| 2 | Messwert Winkel neg. Flanke 32 Bit | 0x424b | Verwendung der obere 16 Bit(*) |
Für den b maXX 5000 müssen abhängig von der verwendeten Achse (EA: Parameteroffest 0x2000 / DA: Achse 1 = 0x2000 / Achse 2 = 0x4000), dem verwendtem Encoder (Geber 1/Geber 2) und digitalem Eingang (MT1 / MT2) Prozessdaten gemapped werden.
| Encoder | Parameter | Objekt Nummer | Bemerkung |
|---|---|---|---|
| 1 | Geber 1 Winkel-Istwert 32 Bit | 60fb.0A | 32 Bit Winkel |
| 2 | Geber 2 Winkel-Istwert 32 Bit | 68fb.0A | 32 Bit Winkel |
| Messtaster 1 Eingang: | |||
| 1 | Messwert Umdrehungen pos. Flanke 32 Bit (MT1) | 207c.05 | Verwendung der unteren 16 Bit(*) |
| 1 | Messwert Winkel pos. Flanke 32 Bit (MT1) | 207c.06 | Verwendung der obere 16 Bit(*) |
| 1 | Messwert Umdrehungen neg. Flanke 32 Bit (MT1) | 207c.07 | Verwendung der unteren 16 Bit(*) |
| 1 | Messwert Winkel neg. Flanke 32 Bit (MT1) | 207c.08 | Verwendung der obere 16 Bit(*) |
| 2 | Messwert Umdrehungen pos. Flanke 32 Bit (MT1) | 207c.11 | Verwendung der unteren 16 Bit(*) |
| 2 | Messwert Winkel pos. Flanke 32 Bit (MT1) | 207c.12 | Verwendung der obere 16 Bit(*) |
| 2 | Messwert Umdrehungen neg. Flanke 32 Bit (MT1) | 207c.13 | Verwendung der unteren 16 Bit(*) |
| 2 | Messwert Winkel neg. Flanke 32 Bit (MT1) | 207c.14 | Verwendung der obere 16 Bit(*) |
| Messtaster 2 Eingang: | |||
| 1 | Messwert Umdrehungen pos. Flanke 32 Bit (MT2) | 207c.09 | Verwendung der unteren 16 Bit(*) |
| 1 | Messwert Winkel pos. Flanke 32 Bit (MT2) | 207c.0e | Verwendung der obere 16 Bit(*) |
| 1 | Messwert Umdrehungen neg. Flanke 32 Bit (MT2) | 207c.0f | Verwendung der unteren 16 Bit(*) |
| 1 | Messwert Winkel neg. Flanke 32 Bit (MT2) | 207c.10 | Verwendung der obere 16 Bit(*) |
| 2 | Messwert Umdrehungen pos. Flanke 32 Bit (MT2) | 207c.15/td> | Verwendung der unteren 16 Bit(*) |
| 2 | Messwert Winkel pos. Flanke 32 Bit (MT2) | 207c.16 | Verwendung der obere 16 Bit(*) |
| 2 | Messwert Umdrehungen neg. Flanke 32 Bit (MT2) | 207c.17 | Verwendung der unteren 16 Bit(*) |
| 2 | Messwert Winkel neg. Flanke 32 Bit (MT2) | 207c.18 | Verwendung der obere 16 Bit(*) |
Beschaltungsbeispiel für BmaXX 5300 (EA oder DA Achse 1) mit Messtaster 1 und Geber 1:
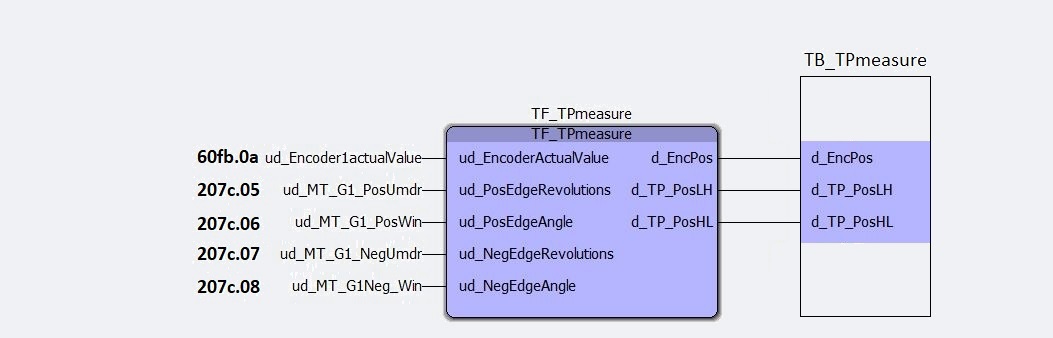
Die Ausgänge d_EncPos, d_TP_PosLH und d_TP_PosHL sind direkt auf die gleichnamigen Eingänge des TB_TPmeasure anzuschließen.